
eFuse如何助力汽车电气化
保险丝是汽车电路中历史悠久的一个存在。当电路系统出现故障时比如某个负载损坏,其后果可能是危险的,比如负载短路引起设备被整体毁坏,引发起火等更进一步的严重危害。保险丝是抵御这些危险过载和短路的重要元件。保险丝内含金属线或金属条,当电流过大时会熔断,切断电路并防止设备系统损坏或进一步危害发生。汽车电路中,传统设计采用可熔断型保险丝,很多保险丝密集设计在一个盒子内,其位置一般会放置在需要更换时方便打开的地方。但由于过于集中在同一位置,而保险丝对应的负载遍布车身各处,这种设计难免造成线束繁多且走线复杂,增加电缆长度,重量和成本。而且,传统保险丝仅提供基础的过流过载的保护,无法提供如过压,精确过流控制,电流反馈,诊断等复杂的保护和功能。eFuse(电子保险丝)是一种集成电路,可以替代以上提到的传统保险丝。eFuse集成了控制电路,大部分产品也集成了MOSFET,其功能不仅仅是保护电路,更是负责给负载分配电源并提供多种保护功能的PD电源分配电路。并且,采用eFuse设计的汽车电路一般采用分布式布局的电源分配结构,这种布局降低了布线复杂度,可以降低电缆长度,并且eFuse的引入还可优化布线线径(过流保护更精准),从而减少了电缆的使用长度和总体重量。 图1 汽车传统的可更换保险丝的保险丝盒 eFuse作为传统保险丝的替代,其拥有巨大的优势。 • 可设置性高:可通过修改内部寄存器或外围器件参数来修改I²t保护参数设置来适应保护不同的线束类别。 • 可升级性好:通常eFuse同一系列甚至不同系列都是设计成可替换引脚排布,不仅可以替换为同一代产品来实现某些性能提升(如额定电流加大),也可以替换成高端系列增加新的功能。 • 支持诊断:eFuse可以反馈很多诊断类信息,尤其是部分eFuse支持SPI或I2C等常用接口可以反馈更多的信息。 • 支持电流反馈:eFuse通常可以支持读取负载的电流信息,这对于主控了解负载的状态至关重要但传统保险丝无法实现这种功能。 • 速度快:传统保险丝是通过热量积累最终熔断设计来实现保护的,其不仅保护电流会受温度影响较大,反应速度也很慢,而eFuse直接采集电流信号,直接根据电流大小来确定保护行为发生,其速度提升巨大。 另外,eFuse还可以提供传统保险丝无法提供的过压保护等功能,其更精确的过流保护设置可以优化线束的线径从而减低重量和成本,其可调整可设置的自恢复特性有助于减低维护成本。 eFuse有很多实现方案,比较传统的分立式方案现在已经不太常用,其使用MOSFET以及外围分立器件检测和控制整个电路运行,由运放、比较器、电阻、电容等构成,这种传统分立式方案电路复杂但性能一般。无法与专用集成电路方案匹敌。专用集成电路则将绝大部分功能集成在一个芯片中,其根据性能和功能多少以及MOSFET外置还是内置也会分几大类。以安森美半导体的eFuse产品为例,其按照功能多少以及是否内置MOSFET划分成了四大类别,以适应不同的功能需求和电流大小需求。通常高电流的通道需要选择外置MOSFET方案,低于30A的电流通道可以根据功能的需求在内置MOSFET方案中选择最适合的一类。 首先是SmartFET–F系列,如NCV840xxF,这是标准高边开关系列。MOSFET内置,可以提供1.5mΩ到45mΩ的选择用以不同电流通道,最高支持到30A负载电流。这个系列可以认为是传统高边开关的功能加强,用在最基础的负载电源控制应用。其拥有一些基础功能:高精度负载电流检测,错误反馈,智能重启(适用于短路或浪涌电流如电容充电场合),快速热响应。这个入门系列没有eFuse最重要的一个功能,用来模拟真正保险丝的I²t保护功能。另外需要提到一个产品NIV3071,其也是属于标准高边开关的产品,其拥有4个独立通道(可不同电压独立供电)且耐受60V的电压,可以支持多路高压应用的场合。 图2 NIV3071典型应用电路框图 功能完善的eFuse,SmartGuard-G系列,如NCV840xxG,这个系列可以认为是拥有eFuse的较为完整的功能。要模拟传统保险丝的熔断行为,最重要的功能是I²t保护功能,在G系列当中不仅支持可设置的I²t保护功能,并且I²t保护电流水平是可由电阻在额定的范围内可自由设置的。同时,过电流限制也是由单独电阻在额定范围自由设置的,电流限制和I²t保护点设置互不影响可以自由组合设置。其拥有低功耗模式(Low Power IDEL Mode),在负载电流需求降低时可以降低电流消耗(关闭一部分保护以及降低输出电流能力)。另外,G系列还增加了非常重要的电容充电模式,用以适应负载含有大电容时充电阶段的应对。SmartGuard-G系列是功能较为完善的内置MOSFET的eFuse产品。 SmartSPI–S系列是拥有SPI接口的eFuse,随着汽车电气化的推进,负载数量越来越多,区域控制器需要分配的电源通道数也一直在增加,传统eFuse采用直接连线来控制和反馈使得MCU的IO资源消耗越来越严重,甚至出现了增加IO扩展芯片来应对eFuse通道数增加的设计。SPI控制的eFuse可以极大缓解这种情况,所有支持SPI的eFuse均可以连接在一个SPI总线上,这极大减轻了对MCU的IO资源的消耗。这个系列的产品电流采样直接数字化输出同样降低了MCU资源的需求。 SmartDriver系列是SPI控制的eFuse高边预驱,采用外置MOSFET架构以应对大电流应用(30A以上的负载)。其拥有非常完整的功能,除了包含以上几个系列提到的功能,其还有看门狗以及预防性维护的功能,电压和温度信息直接数字化输出。 并非所有的产品都可以归为以上4个类别,比如NCV760040,其为4通道非隔离结构,在电流保护功能上接近于基础功能的NCV840xxF系列,没有I²t保护这样的模拟传统保险丝行为的功能,但是其具有I2C通信能力,状态读取以及诊断反馈能力比较强,可以直接I2C读取负载电流或通过CS读取,所以eFuse产品呈现出多种多样的特点,需要根据具体应用来选择合适的产品来获得最佳的性价比。 图3 NCV760040的应用电路框图 接下来介绍几个eFuse最重要的功能,首先介绍保险丝最传统的电流保护功能。最基础的是过流保护功能,eFuse通常具有可调的电流保护点设置能力,用以适应不同的应用场合和负载,以NCV840xxG为例,其电流保护点可以在25%到75%之间以及最大值100%自由设置,通过外部电阻即可更改。除了过流关断功能外,NCV840xxG还内置了一项智能过载保护机制,以I²t函数形式模拟传统熔断保险丝的电流-时间特性曲线。当高电流持续导通时间超过设定的I²t限值时,内置电路会强制输出级关断。该特性精确还原了传统保险丝的电流-时间关系,使用户能够无缝替代传统保险丝来在应用中保护线束。 图4 NCV84003G可以模拟传统保险丝的I²t曲线 接下来我们来看一下应对容性负载的功能。NCV840xxG系列拥有先进的容性负载处理能力,用在拥有大电容特性的负载场合。进入容性负载模式是自动的,作为默认的从睡眠模式的开通策略,IN引脚的使能会让器件自动进入容性负载模式。容性负载模式下,会主动降低斜率使得开通是逐渐进行的。由于容性负载的开通会使得开关管承受非常高的应力,在容性负载模式下降低的动态热保护阈值用以保护开关管不被损坏,这种动态热保护在外置MOSFET的结构中或者分立器件方案中是难以实现的。由于过高的应力会触发如DTSD(动态热保护)或过流保护等,重试策略保证负载被完全充电至完成。 容性负载模式的退出是可以由多种条件触发的,基于Vds检测的自动退出至正常模式,当电容性负载被充电时,输出电压会逐渐增加。Vds会被持续监测,一旦达到由Vds_Norm定义的阈值,器件将退出至正常模式。此外,为避免在此状态下长时间运行,还设计了由tmax_Cap指定的最大时间,内置计时器保证最大50ms的容性模式运行时间,还可以通过CS_EN引脚来控制退出容性负载运行模式。当然,对于不需要容性负载的应用场合,也有特定的操作可以直接进入正常模式。 图5电阻负载电压波形:左图为容性模式,右图为正常模式 过温保护能力,相对于使用分立器件设计的方案,内置MOSFET的eFuse方案拥有更加可靠的热保护能力。NCV840xxG内置了2种过温保护机制,是基于两种测温方式:绝对值和相对值。为了防止损坏发生,任何一种保护触发都会让开关关闭输出。绝对值温度保护的方式比较传统,当芯片内部的温度达到设定阈值TTSD时,开关关闭输出用以保护电路不被损坏,然后核心温度会缓慢降低,当温度下降一定的阈值TTSD_HYS时,电路可以重新启动。而相对值保护适用于在长时间高功率耗散条件下,结温的快速上升会在器件内部产生严重的温度梯度。当这种温度梯度差变化达到规定阈值TDTSD时,相对值温度保护功能被激活,从而关闭器件。需要注意的是,在电容性负载模式下,TDTSD阈值会降低至TDTSD_CL,以限制在给电容性负载充电时器件承受的瞬态应力。此外,热保护将在芯片的差分或绝对热极限被超出时覆盖I²t保护。 随着汽车电气化的发展加深,保险丝这个传统上不被重视的器件也迎来了快速发展时期,并且还在快速发展中。传统的保险丝正逐步被功能强大的eFuse所取代。汽车电路的架构也由集中式向着分布式的架构发展。同时eFuse的发展也极大帮助了汽车电路架构的革新,加强了汽车电路可靠性的同时帮助整体电缆减低长度与线径,使得总体成本、体积、重量得以降低。eFuse还依然处于高速发展时期,其技术已经不单纯追求模拟传统的保险丝的行为,因为传统保险丝并非拥有最优的特性。比如eFuse已经拥有了超越传统保险丝的电流检测保护精度,尤其考虑到不同的环境温度这个优势更加明显。eFuse也已经可以模拟传统保险丝的I²t特性,但传统保险丝I²t行为并非是应用需要的理想行为,安森美目前正在研发能在非恒定I²t条件下工作的eFuse,其曲线点和参数可通过I2C或SPI等串行通信协议进行编程设定。eFuse已经超越传统保险丝,并且这种优势还会逐步扩大,了解eFuse的特点并且在设计初期把eFuse考虑进电路设计架构中已经变得越来越重要,希望此文可以帮助您初步了解eFuse的特点和功能。
安森美 . 2026-04-15 686

Vishay荣获欧摩威汽车系统(长春)有限公司2025年供应链卓越奖
公司凭借其杰出贡献连续第三年获此奖项 今天Vishay宣布,公司荣获欧摩威汽车系统(长春)有限公司颁发的2025年度优秀供应链奖项。欧摩威汽车系统(长春)有限公司是从Continental AG拆分出来,在中国设立的制造分公司。这是Vishay连续第三年获此殊荣,旨在表彰Vishay为欧摩威公司作出的突出贡献,特别是其在满足客户需求方面展现出的快速响应和灵活运营能力。 欧摩威公司生产支持智能出行、车联网及安全应用的汽车电子系统。公司致力于为中国领先的汽车制造商提供服务,产品远销全球20多个国家和地区。在与欧摩威公司的合作中,Vishay为其提供全面的无源器件和半导体解决方案,涵盖MOSFET、电感器、肖特基二极管和整流器、电流检测电阻等产品。这些解决方案对于强化欧摩威公司供应链体系、推动销售额显著增长发挥了重要作用。 Vishay中国销售副总裁唐国承表示:“连续三年获得欧摩威汽车系统(长春)有限公司供应链卓越奖充分证明Vishay对品质、可靠性和响应速度的坚定承诺。在与欧摩威公司的合作中,我们的团队展现出快速响应定制需求的能力,并且能够在必要时灵活调整生产线,以支持紧急订单的交付。此次获奖是对我们努力的肯定,而且我们将继续专注于助力欧摩威汽车系统(长春)有限公司实现长期成功。”
Vishay . 2026-04-15 756

N沟道1200V功率半导体器件参数对比分析报告:UF3SC120016K3S与VBP112MC100
N沟道1200V功率半导体器件参数对比分析报告 一、产品概述 UF3SC120016K3S: 安森美(onsemi)N沟道碳化硅(SiC)Cascode FET(SiC JFET + Si MOSFET),耐压1200V,超低导通电阻(16mΩ典型值),最高工作结温175°C,具有优异的反向恢复特性。封装:TO247-3。适用于电动汽车充电、光伏逆变器、开关电源、电机驱动等高频高效应用。 VBP112MC100: VBsemi N沟道1200V碳化硅(SiC)功率MOSFET,低FOM(Ron × Qg),雪崩能量认证,采用Kelvin源极设计以降低开关损耗。封装:TO247。适用于服务器/电信电源、电动汽车充电桩、光伏逆变器及DC/DC变换器。 二、绝对最大额定值对比 参数 符号 UF3SC120016K3S VBP112MC100 单位 漏-源电压 VDSS 1200 1200 V 栅-源电压 VGSS -20 ~ +20 -10 ~ +22 V 连续漏极电流 (Tc=25°C) ID 107 142 A 脉冲漏极电流 IDM 350 未提供 A 最大功率耗散 (Tc=25°C) PD 517 535 W 结温 TJ 175 175 °C 存储温度范围 Tstg -55 ~ +175 -55 ~ +175 °C 雪崩能量(单脉冲) EAS 327 (L=15mH) 625 (L=0.5mH) mJ 分析:两款器件同为1200V耐压等级,最高结温均达到175°C。VBP112MC100 具有更高的连续漏极电流额定值(142A vs 107A)和更高的雪崩能量(625mJ vs 327mJ),表明其在承受单脉冲过载冲击时可能更具鲁棒性。UF3SC120016K3S 的脉冲电流额定值明确为350A。 三、电特性参数对比 3.1 导通特性 参数 符号 UF3SC120016K3S VBP112MC100 单位 漏-源击穿电压 V(BR)DSS 1200 (最小) 1200 (最小) V 栅极阈值电压 VGS(th) 4 ~ 6 2 ~ 4 V 导通电阻 (VGS=18V, ID=100A) RDS(on) 16 典型 / 21 最大 16 典型 mΩ 正向跨导 gfs 未提供 50 典型 S 分析:两款器件的典型导通电阻值完全相同(16mΩ),均体现出SiC技术带来的极低导通损耗优势。VBP112MC100的阈值电压范围(2-4V)更低,更接近传统硅MOSFET,可能更易于驱动;而UF3SC120016K3S的阈值电压(4-6V)与其内部Cascode结构中的硅MOSFET特性相关。 3.2 动态特性 参数 符号 UF3SC120016K3S VBP112MC100 单位 输入电容 (VDS=800V) Ciss 7824 6800 pF 输出电容 (VDS=800V) Coss 216 230 pF 反向传输电容 (VDS=800V) Crss 3.1 4 pF 总栅极电荷 (VDS=800V) Qg 218 (ID=80A) 200 (ID=50A) nC 栅-源电荷 Qgs 96 80 nC 栅-漏(米勒)电荷 Qgd 24 60 nC 分析:VBP112MC100 的总栅极电荷(Qg)和栅-源电荷(Qgs)略低(200nC vs 218nC, 80nC vs 96nC),但栅-漏电荷(Qgd)较高(60nC vs 24nC)。UF3SC120016K3S 拥有极低的Crss(3.1pF vs 4pF),这对降低开关过程中的米勒效应、提升开关速度非常有利。两款器件的输出电容Coss均处于较低水平。 3.3 开关时间 参数 符号 UF3SC120016K3S VBP112MC100 单位 开通延迟时间 td(on) 44 (ID=80A) 15 (ID=50A) ns 上升时间 tr 75 (ID=80A) 20 (ID=50A) ns 关断延迟时间 td(off) 121 (ID=80A) 未提供 ns 下降时间 tf 26 (ID=80A) 40 (ID=50A) ns 分析:注:两者测试条件不同,直接对比需谨慎。 从文档提供的典型值看,VBP112MC100 的开通延迟和上升时间参数更短,这可能得益于其Kelvin源极设计。UF3SC120016K3S 提供了完整的关断参数,其下降时间(26ns)在更高电流(80A vs 50A)下表现出色。 四、体二极管特性 参数 符号 UF3SC120016K3S VBP112MC100 单位 二极管正向压降 (IS=50A) VSD 1.47 典型 / 2.0 最大 4.1 典型 V 反向恢复时间 trr 66 (TJ=25°C) 35 ns 反向恢复电荷 Qrr 605 (TJ=25°C) 1.5 μC 峰值反向恢复电流 IRRM 未提供 115 A 分析:这是两款器件差异最显著的部分。UF3SC120016K3S(作为Cascode)的体二极管本质是其内部SiC JFET的沟道,因此具有极低的反向恢复电荷(605nC),但文档中Qrr的单位为nC,而VBP112MC100的Qrr为1.5μC(即1500nC),前者优势巨大。不过,VBP112MC100的反向恢复时间(35ns)更短。UF3SC120016K3S的正向压降(~1.47V)远低于VBP112MC100(~4.1V),在第三象限导通时损耗更低。 五、热特性 参数 符号 UF3SC120016K3S VBP112MC100 单位 结-壳热阻 RθJC 0.22 典型 / 0.29 最大 0.2 典型 °C/W 结-环境热阻 RθJA 未提供 62 最大 °C/W 分析:两款器件均具备优异的热传导性能,结-壳热阻RθJC都非常低(约0.2-0.3°C/W),这为其高功率耗散能力(>500W)提供了基础,确保热量能快速从芯片传递到外壳,便于散热设计。 六、总结与选型建议 UF3SC120016K3S 优势 VBP112MC100 优势 ◆ 极佳的反向恢复特性(Qrr仅605nC),第三象限导通损耗极低 ◆ 极低的米勒电容Crss(3.1pF),有利于高速开关与稳定性 ◆ 体二极管正向压降低(1.47V),续流性能好 ◆ 提供明确的脉冲电流(350A)和开关损耗数据 ◆ 更高的连续电流能力(142A vs 107A) ◆ 更高的雪崩能量额定值(625mJ) ◆ 更低的栅极阈值电压,驱动更简便 ◆ 采用Kelvin源极封装,可有效降低驱动回路寄生电感,提升开关性能 ◆ 总栅极电荷Qg略低,可能降低驱动功耗 选型建议 选择 UF3SC120016K3S: 当应用非常关注反向恢复损耗和第三象限导通性能时,例如在硬开关拓扑(如PFC、双脉冲测试负载)中作为主开关,其超低的Qrr和VSD是显著优势。其标准的栅极驱动特性也易于替换现有硅器件方案。 选择 VBP112MC100: 当应用追求更高的电流输出能力、需要更强的单脉冲抗雪崩冲击可靠性,以及希望利用Kelvin源极设计来优化高频开关性能时。其参数表现均衡,且在连续电流和雪崩能力上更具优势,适合大功率、高可靠性要求的场景。 备注:本报告基于 UF3SC120016K3S(onsemi)和 VBP112MC100(VBsemi)官方数据手册内容生成。所有参数值均来源于原厂文档,部分参数测试条件存在差异,直接比较时请留意。实际设计选型请以官方最新数据手册和具体应用验证为准。
微碧
微碧半导体 . 2026-04-15 1050

企业 | TI 联合本土生态伙伴,打造基于AM62L的工业级 SOM 开发新范式
引言 在物联网、HMI、PLC 和通用应用领域,开发者们往往面临着一个“既要又要”的难题:既需要具备稳定可靠的处理能力,又要严格控制成本以及高效的开发效率。在这一趋势下,基于 SoC 的系统级模块 (SOM) 正成为加速产品落地的重要路径——通过标准化硬件平台与成熟软件生态,帮助开发者大幅降低设计门槛、缩短开发周期。 近期,德州仪器 (TI) 联合创龙科技、米尔电子以及正点原子三家本土生态伙伴,基于 AM62L SoC,共同打造面向工业与通用应用的 SOM 解决方案生态,在性能、功耗与开发效率之间实现更优平衡,加速客户从原型验证走向规模化部署。 高能效平台,夯实工业应用基础 作为本次生态合作的核心,TI AM62L 片上系统 (SoC) 是一款面向工业与嵌入式应用优化的低功耗 Arm® SoC,在性能、功耗与集成度之间实现良好平衡。该系统搭载双核 Arm® Cortex®-A53(最高 1.25GHz),可满足 HMI、工业控制与 IoT 边缘计算等多样化场景需求。同时保持平均工业功耗低于 1W,为对能效敏感的应用提供了更优选择。 在系统集成方面,AM62L 提供丰富的外设接口(如 CAN-FD,UART,Ethernet,GPMC等)便于连接各类工业设备与外设模块,提升系统扩展能力。此外,该器件支持安全启动、硬件加密及安全软件更新机制,并具备 -40°C 至 105°C的宽温工作能力,还支持十万小时的 POH 时间,为工业级应用提供坚实保障。再结合 TI 完整的软件开发工具包 (SDK) 及开源生态,开发者可以更高效地完成系统设计与调试。 强大的本土生态伙伴系统,加速产品落地 在芯片能力之上,本土生态伙伴的加入,使 AM62L 进一步转化为“可快速落地”的解决方案。通过 SOM 形式,核心处理能力被高度集成在标准化模块中,开发者无需从底层硬件设计入手,即可专注于应用开发与系统创新。这种模式不仅显著降低开发复杂度,也大幅缩短产品从设计到量产的周期。 依托创龙科技、米尔电子以及正点原子在工业板卡与嵌入式开发领域的长期积累,TI AM62L 系统在本地化支持、接口扩展与应用适配方面具备更强灵活性,能够覆盖从原型验证到批量部署的完整路径。 多样化 SOM 方案,满足差异化需求 围绕 TI AM62L SoC,三家生态伙伴分别推出各具特色的 SOM 及开发板方案,在接口设计、结构形态与应用侧重点上形成差异化补充,满足不同应用场景需求。 创龙科技 采用 LGA+LCC 先进设计技术,提供更高的散热性能和电气性能的同时兼顾小尺寸优势,核心板超薄超小尺寸,整体尺寸 2.8mm*45mm*45mm。可支持安装屏蔽罩,抗干扰能力更强,便于量产贴片设计。 工业级工作温度,可提供配套开发板,整板可支持 -40℃到85℃ 环境温度。经过多项严苛测试,质量稳定可靠。 原生接口丰富,8 路串口,3 路 CAN-FD,2路千兆以太网。外扩 GPMC 接口,实现低成本FPGA 连接。MIPI DSI 视频输出接口最大可支持 1080p@60fps。 米尔电子 采用 LCC 封装设计,抗震抗干扰、封装紧凑且无需多余连接器,便于批量贴片; 通过工业级高低温-40℃~85℃环境温度测试、静电、老化等多重严苛测试,通过第三等级的静电测试,拥有 RoHS、CE 等认证。 核心板 PCB 采用 10 层板设计,在高速场景具有更好的信号完整性,除此之外还采用了屏蔽盖设计可以有效抑制 EMI 干扰和辅助散热。 正点原子 采用 BTB 连接器方式,模块化的设计使得各电路板可以独立生产、测试,最后再快速组装。核心板尺寸 45mm*43mm,体积小巧适配多种应用场景。 核心板已通过多项严苛工业级认证,经过高低温测试、电磁兼容性测试、CE/FCC 认证等。 底板接口丰富,集成串口、多规格 USB 接口、Wi-Fi/蓝牙双模无线通信、高清音频、千兆以太网等基础接口,更拓展 MIPI DSI 显示输出、4G-5G 广域通信、CAN FD/RS485 工业总线、RTC 实时时钟等全场景接口,轻松对接各类外设,加速产品原型开发。 当工业与 IoT 系统不断走向复杂与多样,开发的关键不再只是“做出来”,而是“更快、更稳、更具差异化”。基于 TI 的处理器系统解决方案,结合本土合作伙伴在工程实现与产品化方面的经验沉淀,开发者能够在更成熟的技术基础上展开设计,减少重复投入,将重心转向应用创新与体验优化,在效率、性能与灵活性之间实现更优平衡,也为下一代工业与边缘设备释放更大的设计空间。
TI
德州仪器 . 2026-04-14 1589
应用 |电源与射频的悄然融合
曾几何时,电源工程师与射频(RF)工程师分处走廊的两端。 射频团队对噪声系数和线性度的讨论,仿佛这关乎人类文明的存亡。而电源团队则忧心于电压、电流,以及是否会有部件过热。他们共用同一块PCB,却未必拥有共同的世界观。若频谱中出现杂散信号,那显然是射频问题;若有部件过热,则毫无疑问归咎于电源。 生活曾经如此简单 如今,那些走廊间的界限正逐渐消失。现代转换器切换速度极快,使得布局中的寄生参数如同传输线一般。栅极回路呈现出谐振结构的特性。封装电感不再是可以事后考虑的因素,反而在实验室中以意想不到的振荡形式显现出来。 倘若对电源管理掉以轻心,PCB偶尔会为你献上一场激光灯与烟火的盛大演出。 示波器上,过冲信号闪烁着光芒。频谱分析仪中,充斥着你未曾预料到的谐波。原本规整的开关节点,摇身一变成为宽带“电暖器”,覆盖范围惊人,且完全无视你精心调谐的射频前端。这时,近场探头登场,被当作灭火器般挥舞着。 电路板或许不会真的起火,但它确实可能表现得仿佛在为一场体育场巡演试镜。 陡峭的边沿会引发振铃。回路控制不佳会产生电磁干扰(EMI)。布局中稍有乐观的估计,就可能让原本干净的设计评审,转化为频谱灾难控制。一旦这场“演出”拉开帷幕,便很难再争论说电源管理应归属其它学科领域。 最终,烟雾散去——但愿这只是比喻——而教训也显而易见:高频已不再是射频团队的专属领域。 与此同时,射频系统对“不守规矩” 的电子也愈发难以容忍。人工智能(AI)加速器、相控阵雷达、5G无线电,以及卫星载荷,均依赖于严格受控、动态管理的电源。我们为天线孔径、波束成形算法,以及功率放大器(PA)出色的线性度而欢呼喝彩。然而,如果供电轨更像是“建议”而非“规范”,那么这些子系统都无法正常工作。 纹波转化为相位噪声。 瞬态效应引发频谱再生。 阻抗决定了系统“命运”。 试想一下现代的相控阵系统。成百上千个振子必须在数字控制、转换器和射频前端共享电源域的同时,维持相位一致性。路板某一角落的瞬态事件,可能在其它地方表现为抖动、漂移,或动态范围劣化。在采用高阶调制方案的系统中,这会导致误差矢量幅度(EVM)劣化。在雷达系统中,则可能意味着检测灵敏度降低。 在此环境下,效率不仅仅是一个热性能指标,更成为一项射频规格参数。 随着系统规模不断扩大,功率密度也随之提升。支持AI工作负载的数据中心便是一个直观例证。我们谈论“云”时,仿佛它悬浮于空中。而实际上,它是由一排排硅芯片组成;这些芯片以惊人的速度汲取着严格调控的电流。开关频率不断提高,以缩小无源器件体积并提升瞬态响应速度。而这些更快的上升沿会引入无法忽视的耦合路径和寄生效应。 物理规律是冷漠无情的。电感并不关心自己位于匹配网络还是降压转换器中。一个控制不良的电流回路,无论承载的是载波信号还是开关波形,都会辐射热量。麦克斯韦方程组始终公正无私、一视同仁。 正因如此,电源管理领域的这场“静默革命”才显得尤为引人注目。关注点正从单纯的供电转向智能管理。自适应控制环路能够实时响应。电源域被分割以隔离敏感电路。集成化设计缩小了回路面积并降低寄生参数的不确定性。封装与布局被视为电磁结构,而非单纯的机械层面需求。 换句话说,电源设计越来越像射频设计——只不过电流更大,史密斯圆图用得少了些。 对于微波工程师而言,这种融合既是挑战,也是机遇。现代系统内部的电磁环境错综复杂。高di/dt(电流变化率)的边沿、密集的布线,以及紧凑的集成,几乎容不下任何一厢情愿的设想。电源完整性分析应与S参数和稳定圆分析一样,成为设计讨论中不可或缺的一部分。 机遇同样显而易见。射频工程师本就擅长从阻抗、谐振,和耦合的角度思考问题。将这种直觉应用于电源分配网络和开关回路,能够提升整个系统的性能。当把供电轨视为信号链的一部分,而非背景基础设施时,系统架构将变得更加可预测、更加稳健。 电源管理不再是电路板上那个默默无闻的、“只要能工作就行”的角落。在高性能基础设施、航空航天及国防系统中,它已成为实现差异化的关键杠杆。一套精心管理的电源架构可带来更高的线性度、更低的噪声基底,以及更严格的时序裕量,让射频子系统能够在更接近极限的条件下运行,而不被自身的能源所拖累。 我们常常谈论如何突破频率的边界,但同样重要的是,突破我们对支撑这些频率的能源进行精确管理的边界。 毕竟,最精彩的灯光秀,往往是那个连布局审查都无法通过的。
Qorvo
Qorvo半导体 . 2026-04-14 1015
研报 | 苹果入局折叠手机可望拿下近两成市占,应力管理成改善折痕关键
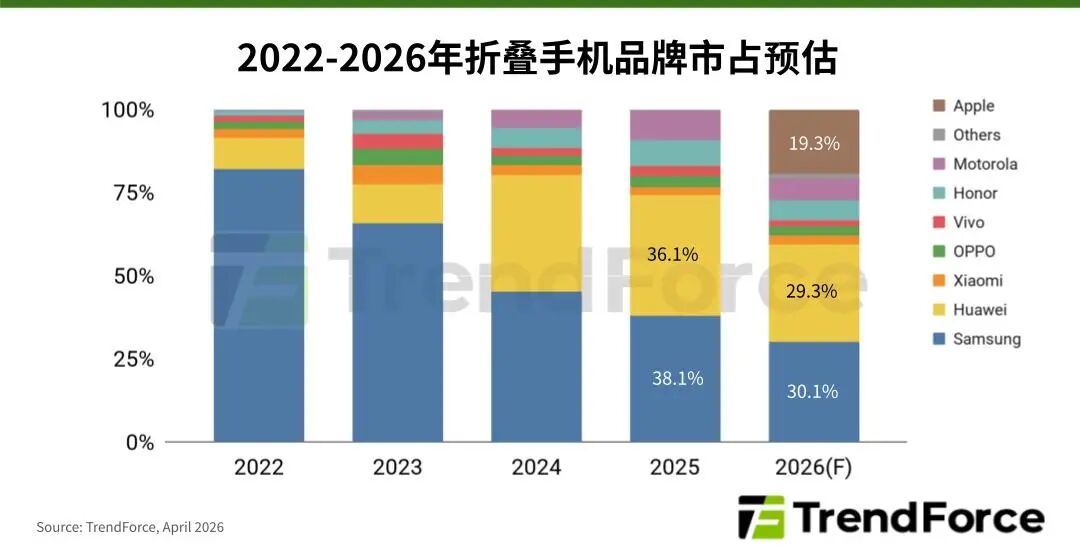
根据TrendForce集邦咨询最新显示产业研究,折叠手机市场最快将于2026下半年迎来Apple(苹果)入局,引发外界关注相关技术革新。其中,面板折痕的优化,正从以往依赖铰链与支撑结构的“机械对抗”,转向以材料堆叠为核心的“应力管理工程”,折痕处理已成为衡量品牌显示技术整合能力的核心指标。 TrendForce集邦咨询预估,Apple凭借品牌形象与消费者的期待,将于2026年取得折叠手机市场近20%的市占,并压缩Samsung(三星)、Huawei(华为)的占比至30%上下。 从年初Samsung在CES 2026展出的无折痕手机面板,到近期OPPO推出以“无感折痕”为号召的新机Find N6,反映出外界对折痕改善与材料技术突破的期待。折痕起因为面板堆叠材料的中性层偏离关键结构位置,导致局部区域拉伸负荷过高,在应力集中的情况下产生微裂纹或永久变形。解决此问题的核心,在于多层结构中精准控制应力分布与中性层位置。 分析新一代折叠手机,UTG(超薄柔性玻璃)不再只是屏幕表面保护层,通过Apple专利中提及的非等厚设计与化学强化工艺,可精准压缩折叠区域以提升弯折能力,非折叠区则维持较高厚度以确保抗冲击性。 然而,2026年折叠屏幕突破的关键,是OCA(光学透明胶)的角色转变。OCA不只是折叠产品的光学黏着材料,通过弹性模量设计与材料组成优化,还能展现显著的黏弹性。弹性模量反映材料在受力过程中抵抗变形的能力,优化的OCA有助调整面板的力学反应。如缓慢弯折时,材料可保持柔软以降低疲劳应力。若遭遇瞬间外力作用,材料模量可暂时提升以提供局部支撑力。 借由上述机制,OCA能协助稳定中性层位置,显著降低折叠过程中的应力集中现象。此外,OCA亦具备微流动特性,可填补折叠区域因长期使用产生的微观不平整,进一步降低光学散射,淡化折痕的视觉感受。 TrendForce集邦咨询指出,尽管材料技术主导折痕改善,机械结构仍扮演关键角色。如OPPO Find N6导入精密加工及3D打印技术,大幅提升支撑结构的铰链平整度,再以高分子材料填补结构间隙,避免局部悬空与应力集中,确保柔性显示材料反复弯折仍能维持稳定形变。至于屏幕后方的金属支撑板,供应商Samsung Display改用雷射钻孔技术,缩小弯折处的孔隙间距,在维持刚性支撑与提升柔韧性之间取得平衡,实现无感折痕的视觉体验。 整体而言,折痕改善的关键,已从铰链设计转向材料模量、厚度分布与应力释放的协同配合。这场由材料科学主导的转型,正是迈向“无感折痕”的最后一公里路。
苹果
TrendForce集邦 . 2026-04-14 1421

企业 | 靶向创新:旷视做智能体硬件的敏捷法则
智能体硬件正成为AI技术落地的关键载体。然而,做好一款真正能“解决问题”的智能硬件,它将面临从场景定义、研发体系到工程闭环的全方位考验。旷视深耕AI领域多年,不仅在算法上持续领先,更在智能硬件领域摸索出一套独特的 “靶向创新”方法论,这套方法论源自硬件团队在业务一线打磨真实产品、解决产业痛点的实战沉淀。通过与王飞的深度对话,以近期发布的新品“旷视魔方智能体分析盒”为例,首次系统性地分享旷视做智能体硬件的核心准则。 靶向定义:让硬件成为智能体最贴切的物理形态 “因其研发周期长,验证复杂的特点,做硬件最大的风险,不是技术做不到,而是做出 来的东西没人要。” 他举了一个生动的例子:“比如我们要做一个智慧交通项目,交付一个智能体。它不可能是一个纯软的SaaS模式——它必须是一个能装在灯杆上、耐高温、高可靠的物理硬件设备。这就是硬件赋予智能体的交付形态。” 过去,传统硬件开发往往是先做出一个具备强大功能的产品,再去寻找应用场景。但旷视的解法是深度融入业务前线,在那里,研发团队与一线工程师、客户和运维人员反复沟通,从海量真实的痛点中精准提炼出智能体最需要的物理载体形态。 以旷视魔方智能体分析盒为例。王飞透露,这款产品的诞生并非凭空想象,而是团队在大量项目交付中敏锐发现:客户需要一个具备边缘智能、能实时响应、且易于部署的智能体硬件。“很多客户没有强大的机房或云端资源,他们希望一个盒子就能跑智能体——插上电、连上网,就能完成识别、分析、预警。这个盒子,就是智能体在边缘侧最贴切的物理形态。”王飞说。 因此,旷视精准定义了魔方智能体分析盒——它集成了算法、算力与通信能力,让智能体得以在边缘侧直接运行。其研发逻辑完全以智能体的算法需求为先,再匹配硬件选型与参数,区别于传统以硬件功能为主导的思路。王飞总结道:“精准定义的本质,是让智能体硬件这个“载体”,牢牢对准产业的真实刚需。” 体系护航:IPD+PDT,让智能体交付更具性价比 “在智能体硬件领域,稳定的可靠性远比炫技的参数更重要。但还有一点同样关键:专业的硬件工程化,能让交付的智能体更具性价比。” 他算了这样一笔账:“旷视魔方盒子用一台服务器五分之一的价格,就跑出了同样效果,哪个更能促进智能体快速落地?轻量化的交付,大幅降低了客户使用智能体的门槛。这就是硬件工程化的价值——标准化、高性价、免运维。” 为了让这个价值落地,旷视全面引入了IPD(集成产品开发)体系,并组建了跨职能的PDT(产品开发团队)。在这里,硬件工程师、软件工程师与算法专家不再是“接力跑”——硬件做完扔给软件,软件调完甩给算法,而是从立项第一天起就并排坐在一起,共同决策。 王飞强调,旷视对“性价比”的理解,并非只看单次采购成本,而是以“综合高性价比”为使命,从研发源头就把全生命周期成本、免运维、长期稳定融入每一个开发动作: 芯片选型阶段,就充分考虑未来 3 年算力冗余与功耗平衡,避免频繁升级换代,降低客户长期投入; 仿真验证阶段,提前模拟各类极端工况,在设计阶段就暴露并解决问题,大幅减少后期故障与维护成本; 生产溯源环节,每一颗物料、每一块电路板都有唯一 ID,可追溯至生产批次与操作人员,从源头保障品质一致性,减少售后隐患。 此外,所有硬件在出厂前都要经历标准且严格的自测试验证,确保在物流分拣中心、户外杆件、工厂产线等 “非友好环境” 下仍可 7×24 小时稳定运行,真正实现高可靠、少故障、免运维,用持续稳定的使用价值,为客户带来更高的综合性价比。“体系护航的价值,不仅是让智能体硬件稳定可靠,还能让客户能获得更高性价比的智能体能力,真正降低智能体的落地门槛。”王飞说。 敏捷闭环:让硬件跟上智能体的快速演进 “传统硬件开发周期长、迭代慢,而算法以周为单位进化。我们要打破这一僵局,让硬件跟上智能体的步伐。” 当算法以周为单位迭代进化时,硬件往往还停留在一年前的设计。旷视打破了这一僵局,建立了 “需求-验证-迭代”的高速闭环: 需求端:业务侧和算法团队将最新的算法模型与场景痛点实时同步给硬件团队; 验证端:利用模块化设计能力,让已出货的硬件也能快速获得新算法的“赋能”; 迭代端:硬件工程团队以“小步快跑”的方式,优化算力性能、丰富应用接口,完善业务逻辑PPL等维度,持续输出产品化迭代。 这套闭环机制,使得旷视的智能体硬件不再是“一次定义、终身不变”的孤岛,而是能够伴随AI技术演进持续生长的有机体。“真正的护城河不是单一技术的领先,而是硬件、软件、算法之间深度协同所带来的‘系统迭代速度’ 。”王飞总结道。我们相信,在智能体硬件领域,深度协同所激发的系统性创新与工程可靠性,其价值远超规模的简单叠加。
旷视
旷视MEGVII . 2026-04-14 1162

企业 | 国芯科技与中国人民大学共研AI安全推理一体机,为用户数智化保驾护航
近日,数智经济创新发展环省行暨苏州高新区数智产业融合发展大会顺利举行。会上,苏州国芯科技股份有限公司与中国人民大学苏州人工智能学院签约,双方将围绕“AI+数据安全”方向,共同研发AI安全推理一体机。 当前,AI大模型正从“对话”走向“行动”,成为各行各业用户提效的核心引擎。然而,当智能体开始自主调用工具、处理敏感数据时,安全问题亦随之凸显:云端调用,则面临数据泄露风险;本地部署,又需直面运维复杂等难题。AI安全推理一体机,正是为破解这一困局而生——它立足于“本地化部署、数据安全、全栈可控”,致力于达成双重目标:既要筑牢安全底线,也要释放AI效能,让关键领域的智能化征程再无后顾之忧。 直面风险:AI应用落地的“拦路虎” 在AI规模化应用进程中,用户普遍面临三类核心风险: 数据应用风险 调用云端 AI 应用处理或本地非安全的设备处理数据时,敏感数据因公网传输、网络安全漏洞、内部人员不当操作等,可能导致数据泄露,滥用隐患,给用户带来严重损失和风险。 专有知识库泄露风险 专有知识库数据可能被篡改、删除或注入错误信息,误导推理过程,威胁整个推理系统的稳定运行。AI推理依赖的专有知识库若遭破坏或篡改,将影响推理正确性和可靠性。 运维管理风险 多用户或多智能体并发运行时,缺乏统一监控与权限管控,易出现“权限失控”“操作不可追溯”等问题,难以满足一些用户数据安全和合规要求。 夯实安全:构建“端到端”安全推理体系 AI安全推理一体机通过“硬件+软件+模型+安全”的深度协同,打造从底层算力到上层应用的全链路防护: 物理隔离,数据不出域 AI 安全推理一体机采用本地化私有部署,所有数据计算、模型推理均在本地完成,彻底切断公网传输路径。核心业务数据全程本地化安全处理,从物理层面杜绝泄露风险。 国密加密,权限管理 设备融合国密算法模组、AI服务器或工作站、大模型及其私有化部署应用,构成由AI推理卡、密码卡、工作站或服务器及大模型应用组成的软硬件一体化解决方案,实现运行环境的安全可控、权限的分层管理,以及算法与数据的安全调用与存储。 国产算力,全栈可控 全面适配国产主力机型和算力卡,内置国内主流大模型,支持离线运行。既满足信创要求,又避免“卡脖子”风险,算力资源完全自主掌控。 产品特点 开箱即用 无需复杂安装配置,开机即可运行,一站式解决硬件选型优化、AI平台搭建及信创标准合规等问题。 软硬一体 硬件资源与模型需求精准匹配,充分释放模型性能,提升计算效率与推理准确性。 安全可控 以数据安全与硬件可控为底线,全面满足安全、可控、信创三重标准。 抗量子技术 采用先进抗量子加密技术,为数据存储与传输提供全方位防护,有效应对量子计算时代的安全挑战。 应用场景 在应用场景方面,安全推理一体机将面向覆盖电子政务、智慧工业、金融科技、能源电力、政法公安、医疗健康、央企国企、教育科研等领域,支撑大模型私有化部署、政务问答、安全公文生成、工业质检安全推理、隐私数据AI分析、科研数据安全计算等典型场景,致力满足各行业对本地AI部署与数据安全的核心需求。 结语 近日在武汉召开的中国人工智能产业发展联盟第十七次全体会议上,工信部明确将以制造业为主战场,着力“提供一批新型智能终端”并“做强安全治理”。国芯科技与人民大学联合研发的AI安全推理一体机,正是响应这一政策、直面产业安全与效率矛盾的关键实践。它以“本地化部署、数据安全、全栈可控”为核心,为制造业提供了符合政策导向、能同时筑牢安全底线并释放AI效能的新型终端,让企业在智能化转型中安全提速、智造未来!
国芯科技
苏州国芯科技 . 2026-04-14 1 1680

市场 | Omdia:存储成本上涨推升设备价格,2026年中国大陆智能手机市场小幅下滑1%,华为领跑中国市场
Omdia的最新研究显示,2026年第一季度,因为成本上涨导致部分品牌产品涨价,大盘持续呈下滑趋势,中国大陆智能手机市场同比下降1%,出货6980万台。华为以1390万台的出货量得到第一,占据20%市场份额,延续强劲势头。苹果排名第二,出货量1310万台,市场份额为19%。OPPO在realme回归后首个季度出货1100万台,排名市场前三。vivo出货1050万台,排名第四。小米出货870万台排名第五。 Omdia首席分析师侯林(Hayden Hou)表示:“因为存储涨价的原因,部分品牌在第一季度提高了部分产品的零售价格,以在销售量、销售额和品牌利润之间找到相对平衡的区间,但这毫无疑问对消费者的购买意愿产生了消极的影响。 而华为与苹果则并未进行大规模涨价,并且将成本上升视为扩展市场份额的契机,这也使得两个品牌的产品目前相对更受消费者欢迎,也是第一季度这两个品牌表现相对更为出色的原因。” Omdia资深分析师钟晓磊(Lucas Zhong)表示:“成本上升将使中端及入门级价位手机变得更为被动,尤其是对于往年比拼硬件配置、主打性价比的产品系列而言,今年可能会面临更大幅度的涨价。而另一方面,旗舰以及折叠新品的创新依然有望维稳整体需求,例如小米17 Ultra系列的LOFIC影像传感器,OPPO Find N6的无感折痕,以及荣耀Magic V6的轻薄大电池,在外围配置上的进步将是今年产品迭代的主旋律。另一方面,AI智能体功能将会是今年TOP厂商在软件层面部署的重点。智能手机仍是AI智能体的理想载体,而对于手机厂商而言,目前的破局之路仍仰赖AI功能的突破,谁能带来与众不同并且更为实用的AI智能体功能,谁就可以在实现品牌形象突破的同时建立新的战略护城河。” Omdia首席分析师侯林(Hayden Hou)补充道:“2026年第一季度,华为、苹果、小米、OPPO、vivo、荣耀六家的出货占比已经占到整体的94%。这TOP6品牌已经在供应通路、研发能力、系统服务、生态组建、渠道建设等方面形成了显著优势。但面对时刻变化的手机市场,仍需保持审慎灵动,不论是存储价格的变化还是AI的发展都可能对手机市场格局产生结构性影响。目前中国大陆的市场大盘已经开始受到内存涨价的影响持续走低,Omdia 预计,2026年全年中国大陆智能手机市场将处于下行趋势,全年出货量或将下滑约10%。”
存储
Omdia新消费生态调研-原Canalys . 2026-04-14 3269

产品 | 圣邦微电子推出车规级线性稳压器SGM70420xQ/SGM70430xQ系列,带看门狗和电压监控复位功能
圣邦微电子推出车规级线性稳压器SGM70420xQ/SGM70430xQ系列,带看门狗和电压监控复位功能。该系列器件既可应用于独立承担小型ECU的供电与系统监控,又可为车载低功耗电源管理系统供电,充当待机电源,其中SGM70420xQ输出电流能力为200mA,SGM70430xQ输出电流能力高达300mA。 亮点一:专为OTA远程在线升级优化 在汽车OTA远程升级场景中,传统看门狗可能因升级过程中的周期性复位导致升级失败。SGM70420xQ提供了灵活的系统级Enable和单独的Watchdog Enable功能,支持单独关闭看门狗定时器,且完全不影响线性稳压器的正常输出。这一特性确保在ECU进行OTA升级时,系统不会被看门狗误复位,从而大大提升在线升级的成功率和可靠性。 亮点二:超低待机功耗,轻松满足ECU功耗严苛要求 SGM70420xQ的典型待机功耗超低,静态电流仅23μA,极低的自身功耗使其能够轻松满足整车将单个ECU待机功耗控制在100μA以下的严苛要求,特别适用于对蓄电池续航敏感或长期休眠唤醒的汽车电子模块。 典型应用场景 场景一:独立承担小型ECU的供电与系统监控 SGM70420xQ/SGM70430xQ能够独立为车用小型ECU提供完整的供电及系统监控功能,一颗芯片即可解决电源监控复位与看门狗计时两大需求。典型应用包括: 各类泵机控制器(如水泵、油泵) 热处理系统(如PTC加热器控制器) 天窗控制器 雨刮控制器 场景二:为车辆待机单元供电,充当待机电源 在汽车熄火或驻车状态下,仍需为关键模块供电,并满足ISO 21848 / ISO 16750-2等汽车级低静态电流(<100µA,甚至<30µA)要求。例如在座舱系统、车载远程信息处理终端(T-BOX)、区域控制器(ZCU)等需要实时时钟(RTC)保持走时、系统长期处于低功耗待命状态的场景中,SGM70420xQ/SGM70430xQ可作为待机电源,确保系统在休眠时依然能够精准计时,并在需要时快速唤醒。 基础规格和可靠性 宽工作条件:输入电压范围3V至42V,工作温度-40℃至+125℃,符合AEC-Q100 Grade 1标准; 高精度输出:固定5.0V/3.3V输出,精度±2%,具备高精度输出电压容差; 卓越低压差:100mA负载时典型压降仅115mV; 出色的稳定性:在汽车启动工况下,即使VCC低至3V,只需在输出端使用1μF陶瓷电容即可保持芯片输出的快速响应和稳定; 可编程复位监控:内置复位电路监控输出电压,提供可编程欠压复位阈值(最小2.5V)和可编程延迟时间; 符合环保理念的封装:器件采用SSOP-14(Exposed Pad)绿色封装。 SGM70420xQ/SGM70430xQ系列是汽车应用中兼具电压监控、看门狗监控、支持OTA在线升级、超低功耗等诸多特色的理想线性稳压器选择。无论您是需要为泵机、天窗、雨刮等控制器提供可靠供电,还是为座舱、T-BOX、ZCU等系统搭建低功耗待机电源,SGM70420xQ/SGM70430xQ系列都能以一颗芯片满足多重需求。 SGM70420xQ/SGM70430xQ系列在覆盖车规应用的同时,都同步推出工规版本的SGM70420/SGM70430,欢迎咨询。 图1 SGM70420xQ典型应用电路 图2 SGM70420xQ/SGM70430xQ封装引脚图
新品
圣邦微电子 . 2026-04-14 1253

产品 | 川土微电子CA-IS1200C全新一代通用隔离运放
川土微电子全新一代CA-IS1200C系列通用隔离式运放,在继承CA-IS1200经典性能基础上,实现了从精度、功耗到集成度的全面进化: 精度代际跨越: 进一步优化失调电压与增益误差,让测量更精准 。 功耗大幅缩减: 高边电流降低逾 50%,显著缓解系统发热 。 设计极致紧凑: 新增窄体封装,助力 PCB 实现更高功率密度 。 从性能的全面超越到封装的灵活进阶,CA-IS1200C 致力于为客户打造更高效、更可靠的工业监测方案 。 产品概述 CA-IS1200C是一款专为分流电阻式电流检测设计的高精度隔离式运放。器件通过先进的电路设计和封装设计,在全工作温度范围内保持测量的精度,采用二氧化硅(SiO2)作为隔离层,实现高压域到低压域的精密模拟信号采集。 器件支持3.3V/5V双电源供电,具备高共模瞬态抗扰度(CMTI),典型值达±150kV/μs,可在高噪声、高压大功率开关环境中稳定工作。同时内置输入共模过压检测与高边电源丢失故障输出功能,便于系统诊断。 产品选型表: 特性 差分输入电压范围:±250 mV 固定初始增益:8 低输入失调和温漂:25°C时±1 mV(最大值),±3.5 μV/°C(最大值) 低增益误差和温漂:25°C时±0.3%(最大值),±50 ppm/°C(最大值) 低非线性度和温漂:额定范围内0.04%(典型值),±1 ppm/°C(典型值) 高边和低边均支持3.3 V和5 V供电电压 高共模瞬态抗扰度:±150 kV/µs(典型值) 宽工作温度范围:–40°C到125°C 多种封装选项:SOIC8(S)、DUB8(U)、SOIC8-WB(G) CA-IS1200C引脚图 典型应用场景 工业电机控制和驱动 三相电机相电流检测,耐受高母线电压和高共模瞬态噪声 隔离式开关电 原边电流采样,为副边控制器提供安全、准确的反馈信号 不间断电源(UPS) 电池管理及逆变器电流监控,保障系统可靠性 高压母线电压检测 利用低输入漏电特性,配合外部电阻分压实现电压测量 其他需要隔离信号调理的场景 如光伏逆变器、充电桩、伺服驱动器等 CA-IS1200C是川土微电子在隔离运放领域的诚意升级之作。它不仅继承了原系列的高隔离电压、高CMTI、宽工作温度等优点,更在精度、功耗、输入漏电等关键指标上实现跨越式提升,同时提供窄体SOIC8封装,助力客户实现更紧凑、更高效、更可靠的设计。
川土微
川土微电子chipanalog . 2026-04-14 1617
产品 | 英特尔推出自研纹理集神经压缩SDK:纹理体积最高缩小18倍
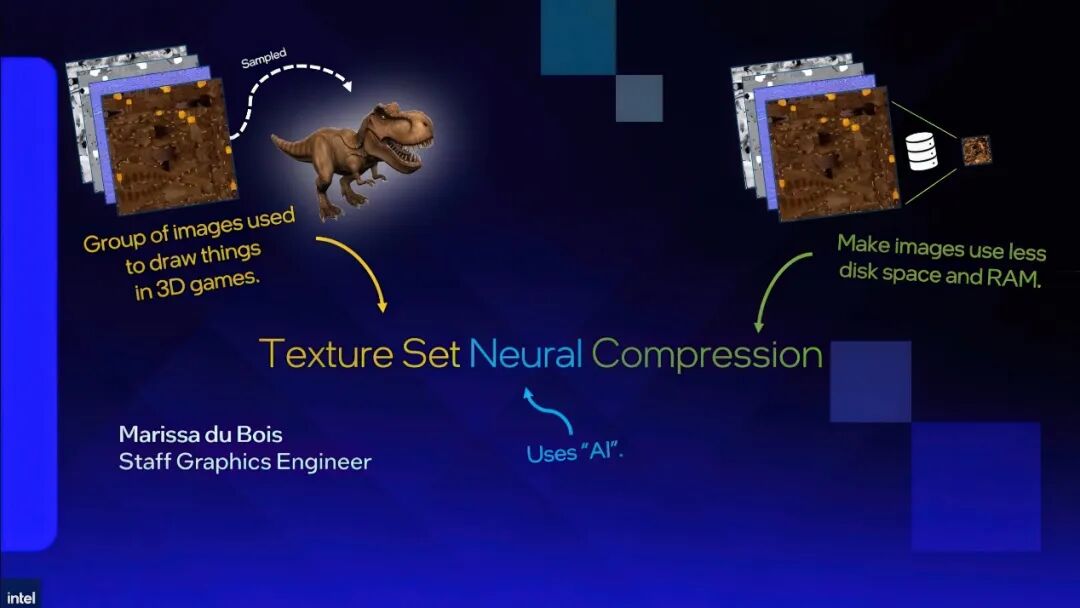
在GDC 2026大会上,英特尔图形工程师Marissa du Bois登台展示了英特尔的神经纹理压缩技术版本。该技术与NVIDIA的NTC非常相似,两者都采用确定性方案。此次演讲是2025年GDC上展示的原型研发项目的后续跟进,关键消息是英特尔现已将该研究产品化为独立的SDK。 纹理集神经压缩(TSNC)本质上是一种更智能的游戏纹理存储方式。传统的GPU块压缩格式(BC1至BC7)使用固定数学规则来减小纹理大小,虽然速度快且 universally supported(普遍支持),但留下了巨大的压缩潜力。TSNC采用根本不同的方法:它使用随机梯度下降训练一个小型神经网络,学习对特定纹理集中的纹理进行编码和解码。结果是得到一个紧凑的潜在空间表示,一个微小的多层感知器可在运行时将其重建为原始的漫反射、法线、粗糙度、金属度、环境光遮蔽和自发光数据。 关键在于,一个纹理集(单个材质的所有PBR贴图)在其通道之间存在大量冗余结构。TSNC以通用块压缩根本无法实现的方式利用这种共享结构。 TSNC压缩方案的核心是特征金字塔,一组跨不同分辨率配置的4个BC1编码潜在空间纹理。英特尔目前提供两种变体,具有不同的质量/压缩权衡: 变体A使用两个全分辨率潜在图像和两个半分辨率潜在图像。对于4K输入纹理,这意味着两个4K和两个2K潜在图像,总计约26.8 MB,而原始未压缩位图为256 MB。这实现了超过9倍压缩,几乎是标准BC块压缩单独实现的4.8倍的两倍。通过NVIDIA的FLIP分析工具测量的感知质量损失约为5%,在实际应用中主要表现为法线贴图的轻微精度损失,其他方面影响不大。 变体B是激进选项。它将潜在图像级联降至原始分辨率的1/2、1/4和1/8,实现超过17倍压缩,是变体A的两倍以上。然而,质量损失更为明显:BC1块效应开始出现在法线贴图和AO/粗糙度通道中,FLIP测得的感知误差约为6-7%。从绝对数值上看这可能很小,但英特尔承认这"足以被观察者注意到"。因此,变体B可能最适合用于远景或次要材质,这些地方的画质损失不太可能被仔细审视。 自去年基于PyTorch的原型研发以来,整个纹理集神经压缩压缩器已使用Slang计算着色器完全重写。此外,无论开发者是在Unreal引擎、自研引擎中工作,还是在CPU上运行解压缩,相同的解压缩器代码都可以针对正确的后端。 在GPU方面,英特尔现在支持微软DirectX 12 Cooperative Vectors API,利用Intel Arc XMX矩阵核心(A系列和B系列GPU均配备)进行硬件加速矩阵推理。对于没有XMX支持的硬件,标准的FMA(融合乘加)回退方案可在CPU和非英特尔GPU上运行。 英特尔的Marissa du Bois详细分析了4种不同的部署策略,每种策略在磁盘空间节省和内存使用之间有不同的权衡: 安装时:以压缩形式分发,安装期间在本地解压缩,纹理以未压缩形式存储在用户驱动器上,节省主要体现在分发带宽上。 加载时:纹理在磁盘上保持压缩,游戏加载时解压缩到显存,减少安装大小和加载期间的显存压力。 流送时:结合纹理流送,纹理按需解压缩,对磁盘和内存都是最佳方案,但增加了运行时推理负载。 采样时:纹理在显存中永久保持压缩,并在着色器中按像素解码,这是显存缩减最激进的选项,具有持续的推理成本。 开发者必须根据其特定用例和底层引擎选择其中一种策略。 英特尔在一台配备B390集成显卡的Panther Lake笔记本电脑上进行了基准测试,测试负载为完整的1080p计算着色器工作负载。结果如下: lFMA路径:每像素0.661纳秒; lXMX线性代数路径:每像素0.194纳秒。 硬件加速矩阵运算带来了3.4倍加速,而这些数字在集成显卡上依然成立,使得逐像素采样时部署方案看起来比预想的更具可行性。对于独立显卡,开销会更低。 英特尔计划今年晚些时候发布纹理集神经压缩SDK的Alpha版本,随后推出Beta版和公开发布版,不过这些日期尚未最终确定。
英特尔
奇谱智慧科技 . 2026-04-13 1722

产品 | Supermicro推出紧凑型高能效系统,加速智能化边缘AI应用落地
Supermicro针对边缘AI所打造的专用型系统,可支持实时推论与商业型工作负载,适用于零售、制造、医疗与企业应用等领域 这些系统具有弹性化配置,可在部署空间与电力供应量有限的边缘环境内,提供数据中心级的计算性能 本次推出的系统提供高阶安全性配置,包括TPM 2.0与AMD SEV技术,并结合了远程管理功能,可确保安全、稳定,以及高成本效益的程序运行 【2026年4月13日,美国加州圣何塞讯】Super Micro Computer, Inc.(NASDAQ:SMCI)作为AI/机器学习、HPC、云端、存储和5G/边缘领域的全方位IT解决方案供货商,宣布推出搭载AMD EPYC™ 4005系列处理器的紧凑型高效率平台。这些边缘优化系统,可在部署空间与电力供应量有限的环境内,加速AI推论与通用型工作负载,适用于零售、制造、医疗与企业分部据点等应用。 Supermicro物联网/嵌入式与边缘计算副总裁Mory Lin表示:“Supermicro不断推出高效率的紧凑型系统,为靠近数据生成与处理的部署环境提供强大算力。通过我们基于AMD EPYC 4005处理器的全新平台,包括紧凑型Box、短机身1U,以及Slim Tower等机型,客户可在边缘环境部署AI加速卡与专用型工作负载,实现更佳的性能、更高的安全性,以及更低的功耗,并有效降低整体拥有成本(TCO)。” 更多产品规格与信息:https://www.supermicro.com/en/featured/epyc-4000-series 新推出的产品线机型包括三款边缘AI系统。这些系统可使企业大规模地部署智能化应用,覆盖实时分析、关键商业型基础设施等多种领域,其应用包括防损(Loss Prevention)、无摩擦结账(Frictionless Checkout),以及智慧化零售、餐饮与医疗业的店内分析(In-Store Analytics)。 AMD EPYC™ 4005系列产品线包括: AS -E300-14GR:紧凑型mini-1U Box系统,可支持最高16 个核心与192GB DDR5内存,适用于嵌入式与空间有限的部署环境。此系统具有2.5L机身设计,提供用于销售点系统(POS)的HDMI与Mini Display端口,以及可支持网络网关应用的一个专用型带外管理(Out-of-Band Management)端口与4个GbE端口。 AS -1116R-FN4:短机身1U机架式系统,具有高度的存储容量,并针对企业分部据点部署与零售后端整合进行了优化。 AS -3015TR-i4:此Slim Tower系统提供了边缘部署所需的弹性优势,能支持低噪音式运行,以及一组双插槽 GPU 卡(2.7" H x 6.6" L)的简易安装,例如NVIDIA RTX PRO™ 2000 Blackwell GPU。此外,AS -3015TR-i4的9L机身设计,可依需求搭配薄型光驱与3.5吋硬盘。 这些系统采用了先进的安全性技术,包括TPM 2.0与AMD安全加密虚拟化(Secure Encrypted Virtualization,SEV),并支持完善的联机扩充,例如4个GbE端口,可与销售点系统(POS)、摄像机及企业网络进行无缝整合。 基于AMD Zen 5核心架构的EPYC 4005系列处理器,可实现65W的低热设计功耗(TDP),并支持DDR5内存与PCIe Gen 5扩充。部分处理器型号也整合了AMD 3D V-Cache™技术,可加速数据存取,并提升数据密集型工作负载的性能。 Supermicro的全新边缘系统支持IPMI 2.0远程管理及GPU加速配置,能为现代分布式计算应用提供安全、高能效的可扩充式平台。 关于Super Micro Computer, Inc. Supermicro(纳斯达克股票代码:SMCI)是应用优化全方位IT解决方案的全球领导企业。Supermicro的成立据点及运营中心位于美国加州圣何塞,致力为企业、云端、AI和5G电信/边缘IT基础设施提供领先市场的创新技术。我们是全方位IT解决方案制造商,提供服务器、AI、存储、物联网、交换器系统、软件及支持服务。Supermicro的主板、电源和机壳设计专业技术进一步优化我们的开发与生产,为我们的全球客户实现从云端到边缘的下一代创新。我们的产品皆由企业内部团队设计及制造(在美国、亚洲及荷兰),经由产品设计优化降低总体拥有成本(TCO),并通过绿色计算技术减少环境冲击,且在全球化运营下达到极佳的制造规模与效率。屡获殊荣的Server Building Block Solutions®产品组合使客户能从极多元系统产品线内选择合适的机型,进而将工作负载与应用达到最佳性能。多元系统产品线由高度弹性、可重复使用的建构组件打造而成,而这些组件支持各种硬件外形规格、处理器、内存、GPU、存储、网络、电源和散热解决方案(空调、自然气冷或液冷)。
Supermicro
SMCI . 2026-04-13 1708

企业 | 村田MLCC预计再涨价
村田预计将于4月30日在财报发布会上公布其MLCC定价策略。 由于人工智能服务器和汽车零部件的需求不断增长,多层陶瓷电容器(MLCC)市场或将迎来复苏。 据TheElec报道,被动元器件大厂村田预计将于4月30日在财报发布会上公布其MLCC定价策略。市场预计,村田将在回顾第一季度市场需求后,解释是否以及在多大程度上进行价格调整。 村田是全球最大的MLCC供应商,占据了全球超过40%的市场份额、全球AI服务器70%的市场份额。一位业内人士表示:“如果村田在其财报发布会上公布定价信息,那么国内外MLCC企业的定价策略很可能会随之形成。” 报道进一步指出,MLCC市场,尤其是高附加值产品市场,正逐渐显现供需转变的迹象。用于人工智能服务器和高端车规级产品的高容量、高压MLCC的交货时间正在延长,部分型号甚至出现供应短缺。各公司正致力于扩大人工智能服务器和汽车电子产品的占比。随着半导体性能的提升,MLCC的装机量不断增加,预计短期内市场需求将保持强劲。 今年3月,村田已正式提出涨价,针对AI服务器和高端车规级MLCC产品启动全面涨价,涨幅在15%-35%之间。该价格体系已于4月1日生效。 关于未来MLCC市场情况,行业分析师认为,目前市场正处于“观望”阶段,竞争对手将在观察消费者对村田提价的反应后,决定是否跟进。以高价值产品为中心的平均售价逐步上涨被认为是更为现实的情况。业内人士指出:“2020年至2021年,IT需求提前爆发,导致后期出现需求缺口,价格在激增之后大幅下跌。目前需求强劲,但价格进一步上涨仍需谨慎。” 基于谨慎的提价策略,其补充道:“由于MLCC厂商众多,很难像半导体行业那样形成超级周期结构。” 中金公司则指出,本轮MLCC拟涨价与前两轮的共同点在于成本支撑及高端产品供需偏紧,不同点在于消费电子需求平淡。因此倾向于结构性涨价的出现,即AI服务器敞口和稼动率较高的海外龙头具备涨价条件,国产MLCC厂商跟进涨价或加速国产化的机会待观察。 该机构表示,AI服务器MLCC格局高度集中,由村田和三星电机主导,二者稼动率已达到高位。由于日韩厂商扩产节奏通常稳定,且高端MLCC占用产能更多,随着AI运算需求持续增长,需关注海外龙头高端产品对常规品产能的挤占情况。若此情况发生,对于国内而言,一方面国产MLCC厂商有望获得加速国产替代或跟进涨价的机会,另一方面海外龙头的国产原材料供应商有望受益。
村田
科创板日报 . 2026-04-13 2597

企业 | 美新半导体获得2亿元新一轮投资,以MEMS传感器IDM模式实现技术突围
美新半导体正在致力于打造拥有MEMS行业稀缺资质、具备系统级解决方案潜力、且在自主可控产业链中占据卡位优势的战略资产。 美新半导体获得2亿元投资,把握AI机器人发展机遇 日前,美新半导体获得安徽芜湖国资领投的2亿元投资,计划将多年持续积累的MEMS创新产业落地芜湖。“芜湖前期的产业生态布局,为美新半导体产品链路拉通提供了很好的生态场景。”美新董事长黄海燕表示,“美新半导体的MEMS传感器可以快速应用于各种新兴产业场景,实现场景推动应用,在应用中创新,在创新中提升应用”的良性循环。同时,安徽芜湖招商引资美新半导体,是将推动其产业生态建构。” 时间再往前推进一个半月,2026春晚含AI量创历年新高,字节、阿里、腾讯等大厂的大模型产品外,智元机器人、宇树科技、银河通用、松延动力、魔法原子等一众机器公司各斥资约1亿元,展开了一场技术与定位的“秀场暗战”。其背后,机器人产业链细分领域的竞争也更加激烈。 为机器人们生产各种“感官”的美新半导体(MEMSIC),春节期间生产团队放弃休假,30多人参与测试,24小时两班倒,产线不停歇。准时向客户交付了首批新品——六轴MEMS惯性传感器。 市面上常见的三轴相比,六轴MEMS惯性传感器定位更精准,运行更稳定,手机拍照、机器人走路必须“仰仗”它。过去,六轴MEMS惯性传感器全部依赖进口,美新半导体投入数亿元研发经费,用了近六年时间,研发出打破国外垄断的国产化芯片,今年一月刚量产,就接到国内手机厂商、无人机、海外可穿戴设备品牌的批量订单,产期已经排到了五月底。 在全球MEMS传感器细分领域占据重要位置的美新半导体因此逐渐浮出水面。作为中国最早实现MEMS惯性传感器全链条技术自主可控的企业之一,美新半导体AMR地磁传感器在全球安卓手机市场占有率,以及MEMS加速度传感器市占率都是行业领军者,其为智能手机头部品牌及ODM厂商等提供高可靠性方案,显著增强了中国消费电子产业链的韧性与安全。 而今,凭借在MEMS惯性传感器和地磁传感器等领域的20余年潜心研发深耕,美新半导体有望在机器人传感系统领域复制其在消费电子的成功路径,开启新一轮增长曲线。在这一进程中,美新半导体也将完成从“成熟的、周期性的、标准件供应商”,到“拥有细分行业稀缺资质、具备系统级解决方案潜力、且在自主可控产业链中占据卡位优势的战略资产”的跃迁。 AI驱动:传感与智能深度融合进入新周期 中国电子元件行业协会发布的《2026年传感器十大趋势》明确指出,行业正经历从“数量扩张”走向“结构重构”的深刻变革。这一变革的核心驱动力,正是传感技术与AI的深度融合——传感器是数据采集的“五官”,更是正在进化出“大脑”的智能节点。 随着人工智能技术的爆发式发展,传感器产业正迎来新的战略机遇期。AI 的精准决策依赖海量高质量数据,而传感器作为数据采集的核心终端,其重要性日益凸显。在这个被博世、意法半导体等国际巨头垄断的赛道,美新半导体正试图撕开裂缝。在历经纳斯达克上市、私有化回归、四年无实控人震荡后,2025年终于迎来新的掌舵人。 美新半导体现任董事长黄海燕,十多年前毅然下海创业。2013年,她创办浙江炯达能源科技有限公司,并于2017年成功并入上市公司超频三,进入资本市场序列。同年,她联合创办杭州沨华私募基金管理有限公司,如今这家基金管理规模已超100亿元。 2019年,黄海燕做了一个大胆决定——带领沨华资本并联合多家知名投资机构及产业方,以25.6亿元完成了对美新半导体的整体投资收购。当时她的身份只是“投资人”。正式接任美新半导体董事长后,丰富的基层行政工作经历形成了她独特的做事风格——对政策趋势敏锐,力透市场背后的逻辑,擅长资源整合。 “AI时代于制造业产业而言,传感器是一个无所不在的存在,它已打开了风口,因为万物都需要传感,它能够收集数据、发出指令、把数据智能转化。”黄海燕表示。在她看来,AI不仅为传感器带来了广阔的应用场景,更重塑了传感器的技术形态和商业模式。传感器正从单一的物理感知单元进化为智能系统的"神经末梢",产业逻辑也正从单纯卖芯片转向深度绑定应用场景。 黄海燕坚持将技术与应用深度绑定,"在创新中应用,在应用中提升"。其在市场布局中,一方面与国内行业巨头深化合作;另一方面全力开拓新能源汽车、低空经济等新赛道。美新半导体与国内头部电动车企建立对接,让传感器研发与终端需求零距离耦合。这种模式变革,使得传感器的价值不再仅由硬件决定,更取决于其如何嵌入AI生态、解决实际痛点,传感器企业也从元器件供应商转型为智能解决方案的赋能者。 “从应用上我们已经看到了几个比较明显的方向。”美新半导体CEO卢牮介绍,在技术层面,AI与传感器的融合体现在三个维度。“以前的传感器是单颗传感器,现在很多传感器融合。我们有算法,所以本身具备了迎接这个风口的潜力。”多传感器融合会走向更深度的系统级协同。未来赢家属于专注于提供“感知能力集”而非“零件”的公司。 卢牮说,传感器矩阵的创新应用带来的想象空间更大。“传感器以前在同一类子模块上通常只用一个,现在更多创新性应用开始在一个子模块上放一个矩阵。”这种矩阵式布局,让算法的发挥空间呈指数级爆发,包括解锁一些以前被认为“不成熟”的应用,比如极其精密的微表情识别、工业场景下的预测性维护,甚至是医疗级的无创健康监测等。 而AI边缘决策的落地,使传感器本身能够理解“发生了什么事情”,而不仅仅是“检测到什么数据”。“我们已经开始投入人力,致力于AI边缘决策的创新。”卢牮介绍道,通过在传感器端集成AI运算能力,能够实现事件的实时识别和判断,“不单识别单独事件,而且是识别一个叙事,告诉主控发生了什么事情。”整个产业的交互逻辑也会随之改变。 美新半导体传感器实现国产替代,助力各行各业应用升级 当前,中美在半导体领域的博弈是一场涉及供应链、技术标准和产业生态的全面较量。清华大学战略与安全研究中心副研究员孙成昊认为,美国通过“实体清单”扩容、半导体设备禁运、先进制程封锁等手段,构建起覆盖创新链、供应链和数据链的复合管制体系,试图对中国形成“代差锁定”。 在此背景下,中国企业先进制程受限,正通过架构优化、软硬协同等方式,以成熟制程实现性能跃升,完成从“替补”到“主力”的身份转变。CSIS报告指出,中美科技竞争的关键已非单点突破,而是整体生态系的长期博弈。 以美新半导体为例,自1999年成立以来,公司构建了覆盖“芯片设计-晶圆制造-封装测试-算法开发”的完整技术闭环,累计拥有260余项自主研发的境内外专利。具体而言,美新掌握了前道晶圆制造的关键工艺,同时80%的产能自主完成测试和标定——后者对MEMS传感器尤为重要,因为标定直接影响精度,甚至影响用户长期使用后的精度稳定性。美新半导体研发副总裁蒋乐跃表示,“美新半导体车规热式加计满足车规客户0 ppm可靠性要求。” 在技术路线上,美新半导体选择了一条与CMOS工艺兼容的集成路径,全球率先将MEMS和ASIC集成于单一芯片,不仅实现了更优的质量和更小的尺寸,更将每片芯片的成本降低了60%。这种“以设计换工艺、以架构换性能”的思路,恰与当前国产芯片在AI领域的突围路径形成呼应。 黄海燕表示,美新半导体在为客户提供传感器产品的同时,还提供整体的设计方案和架构思路,这种“产品+方案”的模式,让美新半导体与客户深度绑定,“共同抵御市场风险,突破不可测量的天花板,这就是我们所追求的。” 根据咨询公司Mordor Intelligence数据显示,全球传感器市场将从2025年的2443.1亿美元增长至2026年的2694.3亿美元,2031年有望达到4396.6亿美元,2026-2031年复合年增长率达10.29%。另一家研究机构Fortune Business Insights预测更为乐观:到2034年全球传感器市场规模将达5279.4亿美元,2026-2034年复合年增长率为9.30%。 而对于中国市场,中商产业研究院数据显示,预计2026年突破5000亿元大关至5042.4亿元。其中智能传感器市场规模增速更快——2024年为1628.5亿元,预计2026年将达2113.2亿元。 “按照行业预测,未来人均将搭载三台机器人,按照中国10亿人口计算,将产生30亿台机器人的市场需求,每台机器人需要100颗编码器,仅编码器市场就将达到3000亿颗的规模。”卢牮说,“长线来说,这是一个几万亿的市场空间。” 卢牮表示,人形机器人的关节控制、姿态调整、环境交互等功能,都需要高精度的传感器提供支持。美新半导体的编码器、六轴MEMS IMU等产品,能够为机器人提供精准的位置、速度和姿态等数据,结合AI算法,实现机器人的灵活运动和智能交互。 在汽车领域,随着自动驾驶技术的发展,对传感器的精度、可靠性和实时性提出了更高要求。美新半导体的车规级MEMS传感器不仅能够满足传统的安全气囊触发、车身稳定控制等需求,还能为自动驾驶提供环境感知、路径规划、实时的车身姿态和环境情况等核心数据支持。 在消费电子领域,随着功能手机向智能手机的转型,美新地磁传感器为设备的姿态感应、防抖拍摄等功能提供了核心支撑,凭借超高的稳定性和可靠性,占据了国内手机头部品牌市场份额前三,国际电商、搜索和社交平台等巨头也抛来橄榄枝,智能戒指等国际知名可穿戴设备品牌的地磁核心传感部件亦由美新独家供应。 在磁传感器领域,美新半导体已经成为全球最大的AMR传感器供应商之一。其地磁传感器精度非常高,测量的基准是无处不在的大地磁场,产品适用于海陆空广阔空间。 在低空经济领域,美新半导体的传感器为无人机、电动垂直起降飞行器(eVTOL)等提供了核心感知能力。无论是无人机的精准悬停、路径导航,还是eVTOL的飞行姿态控制、避障预警,都离不开高精度的加速度传感器、陀螺仪和地磁传感器。 需要看到的是,中国半导体企业长期、普遍的低利润率状态。中国企业一方面希望以性能好价格低获得市场份额,另一方面因低利润而影响企业长远竞争力。这也是美新半导体等行业企业亟待解答的课题。 在美新半导体看来,真正的国产替代,不是做廉价的备胎,而是做不可或缺的主力。美新不参与同行的价格竞争,而是选择新的路径——“向上卷”技术,“向外卷”市场。 美新半导体以MEMS传感器IDM模式实现技术突围 与许多Fabless(无晶圆厂)芯片设计公司不同,作为全球少数实现惯性MEMS传感器IDM模式(整合设备制造)全链条运营的企业,美新半导体构建了覆盖“芯片设计-晶圆制造-封装测试-算法开发”的完整技术闭环,形成在磁传感器和惯性传感器领域难以复制的体系化竞争优势。 “对于MEMS传感器企业而言,如果做Fabless,企业大概率不能长久。”刘海东解释道,“核心工艺和关键技术要自己掌握,公司一直持续投入研发,已形成包括MEMS传感芯片、智能算法和场景化解决方案在内的一站式解决方案能力,又通过专利、工艺平台和Know-how设置壁垒。这是美新半导体能活那么久的原因之一。” 在当前MEMS传感器“国产替代”深水区,从零搭建一条车规级MEMS产线的资本开支非常高昂。一条8英寸MEMS专线投入需30-50亿元,且良率爬坡周期长达3-5年。美新半导体因此构建了一定的进入壁垒。 上世纪90年代末,“美新半导体是全球第一家做热式加速度传感器的企业,没有可以模仿的对象,我们从零做到进入汽车市场、消费类市场等,这里面有很多原创。”蒋乐跃在回顾美新半导体初创历程时表示。 当时,基于传统机械结构的加速度传感器体积大、功耗高,难以满足消费电子和汽车电子小型化、低功耗的发展需求。美新半导体团队另辟蹊径,研发出基于热对流原理的热式加速度传感器,彻底改变了行业格局。这一技术突破让美新成为全球热式加速度传感器的标杆。 “目前我们是国内少有的车规加速度传感器供应商,对手是国际头部品牌。”卢牮介绍道,面对客户端的品牌迷信和使用习惯依赖,美新用实力说话:“对车规来说,从最重要的安全性角度考虑,我们的抗冲击能力是所有海外对手的10倍。” 但是,市场拓展并非一帆风顺。对于可靠性要求非常高的产品,其核心部件供应商一旦确定就很难替换。美新半导体通过“曲线救国”的策略,先进入韩国市场,通过当地一级集成商将产品装入韩国知名汽车品牌,最终获得国内客户的广泛认可。 蒋乐跃表示:“从技术路径的角度,美新半导体的积累和升级创新都是可以通过短期迭代设计更新就赶超国际大厂的。先完成国产替代,然后是赶超。” 创新MEMS传感器生态构建:政企协同与产业共振 MEMS传感器产业的发展,离不开技术、资本、政策、市场的多维度协同。如今,美新半导体在天津、绍兴、无锡、芜湖自建了制造和封装产线,在中国、欧洲和美国设有研发机构,销售网络遍及亚太、欧洲、美洲和非洲等地区。 作为中国MEMS惯性传感器领域的领先企业,美新半导体掌握了从晶圆到成品的每一个环节,在品牌、渠道到质量把控,建立了完自己的体系。“我们是中国的企业,但我们的战场在全世界。只有在全球市场上和顶尖高手过招,才能证明我们中国芯的成色。”黄海燕表示。 这正是黄海燕20余年的地方工作经历和产业投资经验的优势,美新半导体搭建起独特的政企协同模式。 黄海燕认为,新时代的政商关系,核心是“换位思考、价值共赢”。“现在的政府是服务型政府,他们也希望为企业做实事,但目前的障碍,一是政府有时不知道怎么做,二是怕带来风险和非议。如果能够让政府真正认识到对你的帮助终究是对政府、对社会有利,那事情就变得容易解决了。” 除了地方的支持,美新半导体还积极对接高层战略规划,参与国家级创新平台建设。“MEMS传感器工艺还有一些特别材料类的研发,光靠企业投入,短期很难实现突破,只能是地方牵头平台型实验室,然后由企业来做应用端的市场结合,才能打出最后一公里。”蒋乐跃认为,国家层面的协同创新平台,能够有效整合产学研资源,破解底层技术和核心材料“卡脖子”难题。 人才也是美新半导体构建科创生态的关键路径之一。曾经,美新半导体的研发和技术人员外流严重,被称为行业里的“黄埔军校”。但黄海燕表示,“我们不希望成为只输出人才的黄埔军校,而是要打造能留住核心人才、吸引人才回流的西点军校。”随着战略清晰和上市目标的确立,美新半导体的人才战略逐渐完成升级。 在管理机制上,美新正从KPI转向OKR模式,“我们希望激发每个人的主人翁态度,让研发团队不仅能一鼓作气完成产品突破,更能持续保持创新动力。”卢牮表示,这种文化革新对于公司体量而言“已经迫在眉睫”。 “只有夕阳的企业,从来没有夕阳的产业。”这是黄海燕对团队常说的一句话,“这句话换个角度来说也同样成立,没有所谓朝阳的产业,只有持久努力奋斗的人才成就这个产业或者企业长期向前向上。” 在全球MEMS传感器市场,美新半导体依然面临着综合实力强大的MEMS IDM巨头的压力。相较于国际半导体巨头(年营收动辄百亿美元以上),美新的营收规模仍在数亿美元级别。这限制了其在研发投入、产能扩张、市场推广和并购整合等方面的能力。难以像巨头们那样进行“地毯式”研发和“捆绑式”销售。 “做企业不是一条直线,只要出发点是向上的,我认为结果不会太差。希望能够把所有的积累换成势能,总有一天势能转化为动能,那种动能就能够触达你的目标。”黄海燕说。 从业界来看,当前的美新半导体正处于从“0到1”走向“1到100”的关键阶段,完成从“成熟的、周期性的、标准件供应商”,到“拥有细分行业稀缺资质、具备系统级解决方案潜力、且在自主可控产业链中占据卡位优势的战略资产”的跃迁。
MEMS
MEMS . 2026-04-13 2324

市场周讯 | NVIDIA投资RISC-V公司;马斯克封装厂和PSB厂良率低于预期;三星DRAM合约再涨价30%
| 政策速览 1. 工信部:太空算力为何会兴起?工业和信息化部信息通信发展司副司长赵策表示,太空算力具有在轨实时处理、低成本能源、广域覆盖等优势,有助于增强太空能源开发能力,提升全域覆盖和抗干扰能力,拓展网络应用边界,具有战略价值和产业前景。有报告显示,到2035年,全球在轨数据中心市场规模将达390亿美元,复合年增长率高达67.4%。“我们将加强系统谋划,做好前瞻布局,深化产业培育,进一步协同攻坚,扎实有序推动太空算力产业发展。”赵策说。他进一步说,将组织开展技术演进与产业动向研判,谋划引导太空算力建设应用的政策措施;推动星载抗辐射芯片、星间激光通信等技术和产品研发;还要围绕遥感实时处理、通信增强、时空信息等场景发掘太空算力应用,加快太空算力产业生态培育。 | 市场动态 2. Omida:2026年第一季度台式机、笔记本和工作站的总出货量同比增长3.2%,达到6480万台。其中,笔记本(含移动工作站)出货量同比小幅增长2.6%,达5080万台;台式机(含台式工作站)表现略好,同比增长5.4%,达到1400万台。增长动力主要来自于厂商和渠道合作伙伴提前拉动订单,以应对普遍预期的组件成本上涨,同时Windows 10更换周期仍在推动企业更新预算,以及春季期间Windows OEM和苹果的产品发布较为集中。 3. IDC:2026年第一季度,全球PC出货量同比增长2.5%,达到6560万台。尽管宏观经济环境持续恶化,内存芯片供应紧张,但PC市场仍交出了又一季的稳健增长答卷。这波增长主要受三大因素推动:市场预期元器件价格将上涨、Windows 10系统迁移需求,以及各大厂商密集推出新品。 4. TrendForce:过去多数人形机器人厂商专注在感知、动态平衡与语意理解等底层能力的累积,至2026下半年焦点将转向提供给用户的真实价值。观察全球最大的中国市场,产业以多元商用发展为主轴,正呈现产品应用收敛、通用机器人的大型语言模型(LLM) 深度整合,以及投资热潮延续等趋势。 5. PCB厂商:据悉,包括中国巨石、河南光远新材两家公司在内的多家行业企业已于3月底敲定调价方案,4月1日起正式执行上调后的产品价格。 6. Counterpoint :物理 AI (Physical AI) 设备在 2025~2035 这十年间的累计出货量将达到 1.45 亿台,其中无人机占到 5900 万、机器人为 4800 万、自动驾驶汽车则贡献 3800 万。机构预测人形机器人细分市场将成为物理 AI 领域出货量增长最快的细分类别:2028 年的累计安装量将突破 10 万台,较 2025 年增长 7 倍。 | 上游厂商动态 7. 台积电:今年前三个月营收增长35%至1.13万亿新台币,超过分析师此前平均预计的1.12万亿新台币。这一数据表明,在全球主要英伟达和苹果芯片代工厂的业绩支撑下,即便在中东战争爆发后的最初几周内,全球AI芯片需求依然稳固。数据显示,台积电3月销售额同比增长了45%。这份财报可能有助于缓解市场担忧,即长期持续的中东危机是否会抑制对高能耗AI数据中心及iPhone等设备的支出。 8. Anthropic:据媒体援引三名未具名知情人士报道,Anthropic正在探索自主设计人工智能芯片的可能性。报道称,相关计划尚处于早期阶段,该公司最终可能仍决定只会购买人工智能芯片,而不会自行设计。 9. 中微半导:中微半导2025年年度业绩暨现金分红说明会上,该公司董事长、总经理杨勇表示,公司已经调整落实了产品出货价格,平均涨幅在10%以上。目前产能紧张,订单量持续增加,未交订单压力大,库存水位持续降低。2026年公司将积极寻找更多供应处以扩大产能。 10. 沐曦股份:“AI芯片行业高速增长和国产替代加速将拓宽市场空间,公司最早有望在2026年实现盈亏平衡。营收增速预计保持高位,随着公司持续进行成本优化及费用控制,毛利率趋于稳定,新产品的放量销售将持续为公司带来业绩贡献。”沐曦股份董事长兼总经理陈维良表示。据陈维良透露,曦云C700产品目前正处于软硬件购置和产品设计开发阶段,芯片的核心设计、功能验证已大部分完成,正在进行更深入的性能调优。曦云C700产品适用于各类计算场景,在曦云C600信创市场需求的基础上,更深入应用于互联网等领域,客户范围和销售规模也将相应扩大。 11. 三星电子、SK海力士:三星电子和SK海力士已分别与德国林德公司(Linde)和美国空气产品公司(Air Products)签署了长期额外供应合同,以解决氦气供应短缺问题。其中,林德公司在美国采购氦气原料,并对其进行提炼和加工,从而进入半导体供应链。 12. 苹果:苹果正深化自研AI硬件布局,已开始测试先进的玻璃基板,用于代号为“Baltra”的AI服务器芯片。苹果正在推进AI芯片Baltra,预计采用台积电3纳米N3E工艺,并采用芯粒架构组合,为了增强整个供应链掌控,采取类似“孤岛式”的封闭研发策略,直接向三星电机评估采购玻璃基板。 13. 国民技术:国民技术发布价格调整通知称,近期晶圆、封装材料等核心原材料成本连续大幅上涨,公司经审慎评估,决定自2026年4月7日起,对部分产品价格进行15%-20%的上调。国民技术是一家以MCU与芯片设计为核心的企业,产品体系覆盖MCU、安全芯片、可信计算芯片蓝牙芯片及RCC等产品,广泛应用于具身机器人、物联网、工业控制、电机驱动、电池与能源管理以及汽车电子等领域。 14. 英特尔:消息人士称,英特尔正就其先进封装服务与至少两家大型客户展开持续磋商,其中包括亚马逊和谷歌。报道援引一位英特尔前员工的话称,与台积电的封装方法相比,英特尔的EMIB和EMIB-T封装方法旨在提高能效并节省空间。人工智能推动了对先进芯片封装的需求,英特尔代工业务负责人纳加·钱德拉塞卡兰表示,封装可能会在未来十年改变人工智能革命。英特尔已在其位于新墨西哥州里奥兰乔的工厂做好了EMIB-T的量产准备。 15. NVIDIA:硅谷初创公司 SiFive 周四表示,已从 Atreides Management、英伟达和其他公司筹集了 4 亿美元的资金,以进军蓬勃发展的数据中心中央处理器芯片市场。此轮融资使 SiFive 的估值达到 36.5 亿美元,首席执行官 Patrick Little 告诉路透社,他预计这将是该公司在提交公开募股申请前的最后一轮融资,但他没有透露 SiFive 计划何时进行公开募股。 18. 英飞凌:积塔半导体在其官微宣布,已与英飞凌正式签署了项目合作协议,双方将围绕嵌入式非易失存储等领域深化技术协作,共同推动特色工艺代工能力升级。据积塔半导体介绍,此次引入的SONOS技术,以其工艺兼容性好、集成成本低、量产数据充分的特点,进一步丰富了积塔在高可靠且成本敏感场景下的解决方案。依托持续完善的工艺体系,积塔可向客户提供“存储+控制+驱动+功率”的一站式代工服务,实现从单一工艺优势到方案化平台能力的跃升。 19. 安森美:安森美发布其中国战略,明确将以更加聚焦的方式深化在华布局。安森美将上海设为安森美大中华区总部,意味着建立了区域协同、加快决策和深化生态系统协作的核心枢纽。安森美还将任命中国区总经理,并同时兼任系统工程中国区负责人,全面引领公司在华业务迈入新的发展阶段。在此基础上,安森美通过“在华设计、在华制造、深耕中国、走向全球”四大核心支柱推进其战略落地。 20. 英特尔:英特尔公司通过社交媒体平台“X”宣布,很荣幸能加入埃隆·马斯克(Elon Musk)的TeraFab项目,将帮助SpaceX、xAI以及特斯拉重构硅晶圆厂技术。 21. 汇顶科技:汇顶推出了专为 AI Agents场景设计的安全芯片解决方案。该方案基于获CC EAL5+的eSE芯片,核心设计原则是将最需要保护的安全资产从主机侧剥离,放入物理隔离的硬件可信环境中。这将从根本上消除对主机软件环境的安全依赖,将安全锚点下沉到具备证照和金融级安全的抗物理攻击硬件中。 22. 中微半导体:深圳本土 MCU 龙头企业中微半导体(深圳)股份有限公司(以下简称中微半导体或中微半导)正式向香港联合交易所递交上市申请,拟在主板挂牌交易,独家保荐人为中信建投国际。这是继 2022 年成功登陆科创板(股票代码:688380.SH)后,中微半导体在资本市场迈出的又一重要步伐,也意味着这家扎根深圳二十余年的芯片设计企业有望成为国内为数不多的 A+H 两地上市 MCU 企业。 23. 三星:存储芯片大厂三星电子在今一季度将DRAM合约价上涨了100%之后,而二季度的DRAM合约价将再度上涨30%。这也反映了人工智能(AI)基础设施投资持续扩张的背景下,DRAM需求依然强调。 24. 三星:越南财政部同日在声明中确认,正与三星就一份半导体领域投资合作谅解备忘录展开谈判。三星电子计划斥资 40 亿美元在越南北部太原省建设一座芯片封装厂。该工厂将分期建设,首阶段投资规模为 20 亿美元。截至 2024 年,三星集团已累计对越南投资 224 亿美元,产业布局覆盖家电、显示、消费电子、电路板等领域。 25. 环球晶:环球晶3月合并营收54.5亿新台币,环比增长23.8%,同比增长0.1%。第一季合并营收139.8亿新台币,环比下降3.6%、同比下降10.3%。环球晶表示,产线稼动与出货节奏逐步回稳,除新扩产能持续推进试产与送样外,既有12寸产线维持满载,中小尺寸晶圆稼动率也较前期提升,显示需求面已见初步改善。 26. 芯原:芯原股份2025年财报显示,该公司全年实现营业收入31.52亿元,较2024年度增长35.77%。按业务构成划分,在半导体IP授权业务领域,该公司实现知识产权授权使用费收入6.71亿元,同比增长6.07%;实现特许权使用费收入1.11亿元,同比增长7.57%。在一站式芯片定制业务领域,该公司实现芯片设计业务收入8.77亿元,同比增长20.94%;实现量产业务收入14.90亿元,同比增长73.98%。 | 应用端动态 27. 千问:千问旗舰AI眼镜S1正式开启全渠道预约,将于4月15日现货发售。产品叠加限时优惠和国家补贴后,最低到手价为3499元。这是继首款产品G1后,千问发布的第二款AI眼镜。相较G1,S1采用双电池设计,支持热插拔换电技术,采用双芯架构。 28. SpaceX:因无法取得足够芯片,马斯克近日宣布在美国德州奥斯汀建置Terafab,并由Tesla、SpaceX、xAI共同使用。不过据半导体业者表示,SpaceX的扇出型面板级封装(FOPLP)新厂,设备交机已大致完成,但良率不如预期,量产时程已延迟至2027年中才正式量产。加上迁至德州的PCB厂,产能不足且良率亦不到六成,市场推估,包括群创、意法半导体,还有华通、燿华等供应链持续受益于SpaceX订单释放。 29. 亚马逊:亚马逊首席执行官Andy Jassy表示,公司愿意进行大规模资本支出,并承受短期自由现金流的压力,以换取中长期自由现金流盈余。其表示,公司芯片业务的年化营收现已超过200亿美元,同比增长率达三位数。其还称,如果将芯片业务独立运营,并将今年生产的芯片出售给AWS及其他第三方客户,那么其年化营收将达到约500亿美元。 30. 开普勒机器人:开普勒机器人正式宣布完成亿元级 A++ 轮融资。本轮融资由赛富投资基金领投,诺力智能装备股份有限公司(603611)、深圳民爆光电股份有限公司(301362)战略入股。依托本次产业资本与头部投资机构的双重支持,开普勒正式官宣战略重心深度升级:全面聚焦具身智能大脑建设与力触觉数据采集核心赛道,同时,公司即将重磅发布国内首个原生适配 VTLA 全感知模型的力触觉全栈数采解决方案,以工业垂类纵向泛化的核心路径,用真实场景数据突破行业智能瓶颈,推动工业级人形机器人从硬件落地走向全感知智能进化新阶段。 31. 地瓜机器人:地瓜机器人宣布完成1.5亿美元B2轮融资,B轮累计融资额达2.7亿美元。本轮融资由某零售科技与供应链巨头、Prosperity7风投基金、远景科技集团等战略投资机构,慕华科创、云锋基金、华控基金(T-Capital)、LOOK CAPITAL、凯联资本等一线财务投资机构联合加持,老股东高瓴创投、和暄资本、线性资本、黄浦江资本、滴滴、五源资本、初心资本、梅花创投、淡马锡旗下Vertex Growth持续跟投,将全面加速地瓜机器人商业和开发者生态的全球化布局,以软硬协同、端云一体的具身智能原生技术底座为支撑,为全球机器人产业创新打开全新增长极。 32. Meta:"Neocloud" 新兴云服务企业代表 CoreWeave 美国当地时间 9 日宣布,在此前同 Meta 合作的基础上与这家科技巨头达成了一份新的扩展协议,到 2032 年 12 月向 Meta 交付约 210 亿美元的算力资源。这份新协议的签署意味着 CoreWeave 持有的 Meta 算力订单总额突破 350 亿美元,Meta 也成为 CoreWeave 最大的云服务客户之一。CoreWeave 将在多个数据中心站点部署 Meta 专属容量,包括一部分首批英伟达 Vera Rubin 平台。 33. DeepSeek:DeepSeek 创始人梁文锋近日在内部沟通中透露,DeepSeek 新一代旗舰大模型 DeepSeek V4 将于 4 月下旬正式发布。最新版本中,DeepSeek 输入框上方新增“快速模式”与“专家模式”,这是 DeepSeek 走红以来首次在产品端引入模式分层设计。
半导体
芯查查资讯 . 2026-04-13 1876

展会小结 | 芯查查2026CITE圆满收官,共赴元器件数字化浪潮
第十四届中国电子信息博览会(CITE2026)于4月11日在深圳会展中心(福田)圆满落幕。本届展会以“新技术、新产品、新场景”为主题,汇聚全球1200余家行业领军企业与创新团队,集中展示电子信息全产业链前沿成果与创新应用。 中电港芯查查以展位1A016重磅亮相,全方位呈现“数据查询-商城交易-社区资讯-SaaS服务”四位一体核心业务矩阵,依托数字化能力与生态协同,为电子信息产业全流程高效赋能,展现元器件数字化服务领域的领先实践。 展会期间,芯查查展位人气持续高涨。开展首日便吸引大量专业观众驻足参观、体验交流,芯片原厂和终端应用研发工程师、采购、创客、等人群,在现场工作人员引导下,深度体验芯查查APP功能,围绕产品使用、服务场景、行业需求等方面展开深入沟通,并积极反馈优化建议,互动交流氛围热烈。 为回馈现场观众,展位同步推出关注公众号抽奖互动活动,众多行业人士与参展嘉宾踊跃扫码参与,现场有序高效。定制快充充电线、桌面风扇、文创帆布袋等实用好礼接连送出,在提升参与感与体验感的同时,进一步拉近与产业链伙伴的距离。 图注:芯查查展位现场图 依托本届CITE平台,芯查查充分展示数字化服务实力,与产业链同仁高效对接、深度交流,持续传递元器件数字化赋能理念。未来,芯查查将继续深耕电子信息产业,不断优化产品与服务能力,共筑元器件数字化新生态。
芯查查
芯查查 . 2026-04-13 1337

新品推荐 | 飞腾派PRO开源硬件开发板
在当今快速发展的科技浪潮中,开源硬件正以前所未有的速度推动着创新与教育的边界向外拓展。近日,中电港萤火工场倾力打造的飞腾派PRO(Phytium Pi PRO)正式推出,作为一款面向行业工程师、学生和科技爱好者的开源硬件,飞腾派PRO凭借其强大的国产芯算力、丰富的扩展接口,以及广泛的操作系统生态,正成为探索轻量级AI应用与边缘计算的理想平台。 图:飞腾派PRO介绍与实物图(来源:中电港萤火工场) 飞腾派PRO系列主要特性 飞腾派PRO不仅仅是一块开发板,更是一个连接创意与现实的桥梁。它基于国产嵌入式CPU芯片,自带NPU核心,具有丰富的扩展接口,方便开发者使用。其主要特性如下。 图:飞腾派PRO技术参数(来源:中电港萤火工场) 自带NPU,轻松满足轻AI应用:飞腾派PRO搭载了飞腾自主研发的的八核Arm V8架构处理器,集成了3TOPS@INT8算力NPU与400GFLOPS高性能GPU,使其在轻量级AI应用中游刃有余。无论是图像识别、自然语言处理,还是智能控制,都能提供高效的硬件加速支持。配合板载的最高16GB LPDDR5大内存与PCIe4.0高速存储,飞腾派PRO在处理大规模数据和运行复杂算法时,也能展现出较高的流畅度和响应速度。 丰富扩展,满足多元需求:为了满足不同场景下的开发需求,飞腾派PRO在扩展性上做足了文章。主板不仅支持M.2 M-KEY NVMe固态硬盘作为系统盘,还提供了microSD卡槽用于存储扩展。在高速接口方面,板载的PCIe X4接口、M.2E-KEY接口、miniPCIE接口,使得开发者可以轻松接入高算力AI加速卡、WiFi蓝牙模组、4G/5G模组等。此外,飞腾PRO还集成了大量外设接口,包括双路千兆以太网、HDMI、eDP、USB、UART、I2C、SPI、GPIO等接口。 丰富生态,兼容并蓄:主板的扩展能力极强,板载一个PCIE X4接口、一个M.2E-KEY接口、一个miniPCIE接口,支持扩展高算力AI加速卡、WiFi蓝牙模组、4G/5G模组等。另外还集成了大量外设接口,包括双路千兆以太网、HDMI、eDP、USB、UART、I2C、SPI、GPIO等接口。 主要应用场景 凭借其卓越的性能和极强的可塑性,飞腾派PRO的应用场景十分广泛,主要涵盖以下几个核心领域: • 教学实验:模块化的设计和丰富的资料案例,使其成为高校和职业院校进行计算机体系结构、嵌入式系统、人工智能等课程教学的理想实验平台,充分满足学生的学习与实践需要。 • 机器人开发:强大的计算能力和丰富的控制接口,能够支持复杂的机器人运动控制算法和环境感知任务,是打造智能机器人的得力助手。 • AI 识别:内置的3TOPS NPU 算力,使其在人脸识别、物体检测、车牌识别等边缘端AI视觉应用中表现优异。 • 边缘计算:双千兆网口和强大的扩展能力,使其能够胜任工业物联网网关、边缘计算节点等角色,实现数据的本地处理与实时响应。
新品
芯查查资讯 . 2026-04-13 3199

活动预告|2026 FAIR plus:“大小脑”与关键器件创新论坛
4月22日-24日,FAIRplus2026机器人全产业链接会将在深圳会展中心(福田)9号馆启幕。本届展会定位于“世界级机器人开发制造技术大会”,聚焦机器人全产业链技术与开发资源,以学术会议、标准共建、社区培育、供需对接为核心,推动机器人智能化升级,提升产业整体能力与资源配置效率。 展会期间,中电港芯查查与深圳市机器人协会将联合主办 “下一代机器人智能核心——‘大小脑’与关键器件创新论坛” ,邀请阿加犀、NXP、ADI、molex、瑞萨、江波龙、中电港萤火工场等合作伙伴的技术大咖,深度解码机器人“大小脑”与关键器件的前沿技术与应用。 展会时间:2026年4月23日13:30-17:00 展会地点:深圳福田会展中心9号馆4号会议室 三大核心亮点,直击技术最前沿 现场展示养老机器人、机械臂、灵巧手等整机方案,全面展示底层芯片中实际作业中的功耗与性能表现。 拆解机器人“大小脑”架构,直击机器人智能化的核心技术难点。 现场参与活动赢重磅好礼,惊喜不断。 📝报名方式: 点击此处,免费注册参会! 展会:机器人产业半导体联展区(4月 22日-24日) “2026 FAIR plus机器人全产业链接会” 上,中电港芯查查将携手阿加犀、NXP、ADI、molex、瑞萨、江波龙、威兆半导体、雅特力等合作伙伴,在联展区集中展示针对机器人优化的最新电源、信号链、主控芯片、存储、连接器,以及整体解决方案等。逛展、听会、交流,一站尽享! 图注:机器人产业半导体联展展区示意图
机器人
芯查查 . 2026-04-13 2849

关节模组 | 人形机器人关节主控芯片选型逻辑
重点内容速览: 1. 关节模组对主控芯片的要求 2. 国际半导体厂商的布局 3. 国产半导体厂商的快速崛起 4. FPGA:高端关节的另一条路 5. 关节模组的主控芯片选型矩阵 近年来,在半导体技术和制造技术的推动下,人形机器人发展迅速,变得更加复杂和精确,自由度(DOF)变得更高,且对周围环境的响应时间越来越短,从而能更好地模仿人类的动作。 图:人形机器人主要关节模组分布(来源:TI,芯查查) 更高的DOF,就意味着人形机器人需要更多的关节模组,也就是说需要更多的电机控制和驱动器,因为一般情况下,人形机器人会有20~30个关节,使用48V的电池供电。在上一篇文章中,芯查查主要介绍了人形机器人关节模组的分类,特点、发展趋势,以及主要的供应商情况。本文将会深入探讨关节模组主控芯片有哪些主要的供应商,以及该如何选择的问题。 关节模组对主控芯片的要求 由于人形机器人使用电池供电,因此电机驱动器需要更大限度地提高效率,从而延长人形机器人的工作时间。一般来说,人形机器人使用的电机主要分为两个功率等级,一是四肢的关节模组,通常需要75W~1.5kW的电机输出功率;二是腰部和膝盖位置的6到8个电机,往往需要2.4kW,甚至更大的电机输出功率。 图:人形机器人手部、手臂和肩部中可能存在的电机分布情况(来源:TI,芯查查) 以手臂为例,一只手臂一般会包括5到10个关节模组及一只灵巧手。关节模组通常会使用无框力矩电机,且会采用一颗MCU控制一个电机的方式;灵巧手则主要采用空心杯电机,且有单轴方案,即一颗MCU控制一个电机,也有多轴方案,一颗MCU控制三个电机,或者一颗MCU控制六个电机等。 其实,无论是无框力矩电机,还是空心杯电机,都是属于PMSM电机中的一种,根据当前的趋势,未来人形机器人当中所有的电机都会采用无刷直流电机/PMSM电机,其电机控制系统框图如下图所示。 图:典型人形机器人关节模组电机控制系统框图(来源:TI,芯查查) 选择好了硬件架构,还需要确定控制电机的方法,目前主流的电机控制算法是FOC(Field-Oriented Control,磁场定向控制,也称矢量控制)。其核心思想是通过Clarke变换与Park变换,将复杂的三相交流电机控制问题转化为类直流电机的d-q轴解耦控制,从而精确独立地控制磁通分量和转矩分量,控制频率通常大于10kHz。也就是说,电流环控制周期通常为10-100μs(即10kHz以上),如果有延迟会直接导致电机抖动或者过流。 因此,对关节模组的主控芯片来说,需要满足以下要求: 一是实时性。前面有提到MCU需要在控制周期10-100μs内,完成ADC采样、Clarke/Park变换,电流环PID运算,反变换等流程,这对MCU的主频、DSP能力和外设响应延迟都提出了很高的要求。因为如果有延迟会直接导致电机抖动,或者过流。 二是高精度的模拟前端。相电流采样精度将会直接影响力矩控制的平滑性和精准度。主流关节方案要求ADC采样精度在16位以上,采样速率超过1MSPS,且ADC触发时序必须与PWM严格同步,避免开关噪声干扰采样结果。 三是高分辨率PWM。关节驱动无刷电机(PMSM/BLDC)需要产生精度极高的互补PWM信号,并配置纳秒级死区时间。特别是采用SiC或GaN功率器件时,对PWM分辨率要求更高。 四是编码器接口。关节模组通常配备磁编码器或光编码器,用于精确感知转子位置和速度,MCU需要支持QEI(正交编码器接口)、SSI、BiSS-C等多种编码器协议,并能同时处理电机端和关节输出端的双编码器信号。 五是功能安全与保护。关节模组需要硬件级的过流、过压、过温、编码器断线、通信超时等保护机制,部分高端应用还要求符合IEC 61508或ISO 13849功能安全标准。 六是封装尺寸与功耗。关机模组空间极为有限,主控芯片封装面积和功耗直接影响PCB布局和散热设计。小型关节,例如手腕和手指等对芯片封装尺寸尤为敏感。 然而,这种物理堆叠也带来了不少工程挑战,例如热管理和EMC问题。 国际半导体厂商的布局 聊完关节模组对主控芯片的要求,接下来,芯查查带大家一起了解一些主控芯片的主要供应商都有谁。经芯查查数据平台数据显示,目前国际半导体厂商中,TI、ST、瑞萨、恩智浦、Microchip、英飞凌等均有布局,且不少已经跟人形机器人厂商有合作了。 TI:高实时性 对人形机器人的电机控制来说,良好的实时控制是人形机器人运动的基础,能确保关节动作的实时性、稳定性和安全性。TI的C2000系列MCU和基于Arm Cortex-R5F的AM2612 MCU(主频可达500MHz)都可以提供高性能实时控制,且都集成了EtherCAT从站MAC,支持EtherCAT和CAN通信。 其中,C2000系列在工业伺服领域长期是电机控制MCU的行业标杆。其核心优势在于专为实时控制设计的DSP内核,其C28x内核集成了专用硬件加速器,可将电流环响应时间压缩到2微秒以内。2024年TI又推出了C29x内核,将架构从32位升级到了64位VLIW(超长指令字),性能相比C28x提升了2至5倍,并新增双精度浮点和Helium DSP/ML加速能力。搭载C29x内核的F29H85x系列已将电流环响应提升至1微秒以内。 芯查查从TI的官网上了解到,TI推出了基于TMS320F28P65(包含2个200MHz的DSP内核和1个协处理器CLA)和GaN的关节模组解决方案,在相同主频下,可实现优于传统架构的控制性能,并支持更快的电流环响应(<2μs),显著提升了电机控制的实时性与精度。结合高频PWM控制与低损耗设计,大幅降低了控制器的体积,提升了功率密度。 此外,TI在2026年初推出的AM13E230x MCU(包括AM13E23019,采用Arm Cortex-M33内核)进一步强化边缘AI能力,集成了TinyEngine NPU,助力实现精密电机控制、实时监控和本地AI推理,且其封装尺寸仅为7mm✕7mm。可在关节层面实现故障预测、参数自适应,以及智能负载均衡等功能,代表了”实时控制+边缘智能”融合的新方向。 ST:生态完善 意法半导体(STMicroelectronics,ST)的STM32系列是全球出货量最大的Arm MCU产品线,在人形机器人关节模组中同样占据重要地位。 针对不同功率段关节,ST提供三档方案:STM32H743/H750(双核Cortex-M7 @ 480MHz)适合髋、膝、肩等高动态大扭矩关节,集成184皮秒高分辨率定时器和5MSPS高速ADC;STM32G431/G474(Cortex-M4F @ 170MHz)内置CORDIC硬件加速器,用于FOC三角函数加速,适合中功率关节;STM32G031(Cortex-M0+ @ 64MHz)成本极低,适合手指、头部等低扭矩微型关节。 ST还提供X-CUBE-MCSDK图形化电机控制开发套件和Motor Profiler自动调参工具,配合完善的开发者生态,使得STM32成为工程师上手成本最低的选择。 瑞萨电子:具有工业伺服的深厚积累 瑞萨电子(Renesas)在工业机器人伺服控制领域深耕多年,RA8T2系列(Arm Cortex-M85 @ 1GHz)是其最新旗舰产品,主频在同类电机控制MCU中居于前列,并内置Helium DSP/ML扩展,支持AI预测性维护。 瑞萨电子基于RA8T2推出了一款人形机器人关节驱动解决方案,该方案利用了RA8T2高性能内核和高精度ADC采样(16位 SAR ADC),以及高精度PWM输出功能,确保了机器人关节系统的快速响应和高精度控制。且系统采用了FOC电机控制算法,PWM频率达到了40kHz,通过双绝对值编码器精确控制转子位置。 其经典的RX72T系列(200MHz RXv3内核)已在安川电机等工业机器人巨头中大规模验证,专用位置/速度控制硬件加速器可将计算时间压缩到1.5μs,是工业场景中可靠性最高的选择之一。面向多轴协同的RZ/T2H MPU则可单芯片实现9轴同步控制,适合人形机器人的关节运动。 恩智浦:覆盖从躯干到灵巧手的全场景 恩智浦(NXP)已经推出了完整的人形机器人关节模组主控方案,覆盖了躯干关节到灵巧手等全场景,而且在2025年正式发布了基于I3C总线架构的灵巧手解决方案。 据芯查查了解,目前恩智浦用于关节模组的解决方案主要基于其跨界处理器i.MX RT1180,该处理器基于基于Arm Cortex-M7@800MHz和Cortex-M33@240MHz双核架构,集成了2个I3C接口,可挂载多个伺服节点与触觉传感器,支持EtherCAT、CAN-FD、UART等多种工业通信协议;而且具有2 路 16 位 4M bps 的ADC、高精度PWM等外设。 图:恩智浦人形机器人关节模组电机驱动器框图(来源:恩智浦,芯查查) 恩智浦的MCX A132系列MCU则比较适合手指关节伺服控制。另外,S32K3xx系列(Cortex-M7 @ 480MHz)则延续汽车级可靠性基因,集成ISO 26262 ASIL-D安全岛,适合工业与机器人双线运营的场景。 Microchip:多平台布局 Microchip的布局最为多元:PIC32CM-MC系列(Cortex-M4F @ 120MHz)以低成本和专用电机控制外设面向量产关节;PolarFire SoC FPGA(含MPFS095T)则提供”Arm Cortex-A + FPGA逻辑”的混合架构,适合需要高度实时性、编码器处理和EtherCAT通信集成的高端关节方案。 英飞凌:安全优先的差异化路线 英飞凌(Infineon)在人形机器人方面也有了比较全面的布局,不久前的GTC大会上,英飞凌还与NVIDIA合作,共同开发人形机器人的通用系统架构,以实现超低延时、更加紧凑的外形尺寸,以及更高的功率密度。 据芯查查了解,英飞凌的电机控制解决方案可与NVIDIA Jetson Thor开发平台对接,且搭载了英飞凌的AURIX系列MCU和PSOC器件,支持后量子加密(PQC)技术,以保护数据和系统安全。 其AURIX TC3xx/TC4xx系列(三核TriCore @ 300MHz),主打ASIL-D功能安全认证,适合对安全要求极高的机器人关节,特别是与人直接接触的协作场景。 图:英飞凌用于关节模组的产品布局(来源:英飞凌,芯查查) 据悉,英飞凌科技与其特许经销商贝能国际联合推出了一款高集成度解决方案——基于英飞凌 PSOC Control C3 MCU 微控制器和高效 GaN 功率器件的 400W 机器人关节电机驱动方案,涵盖主控、功率、传感与架构。该方案为工程师提供了一个经过验证的高性能起点,旨在大幅缩短研发周期、加速产品上市进程。该方案PCB尺寸仅为60mm×60mm,开关频率高达100kHz,允许使用MLCC替代大体积电解电容,体积缩减达98%。 此外,其XMC系列工业电机控制MCU,MOTIX电机控制SoC/SiP(高集成驱控一体)系列也适合关节模组主控应用。 国产半导体厂商的快速崛起 在国产替代的大背景下,国内芯片厂商正以惊人的速度在关节模组主控赛道集结,部分产品已进入头部整机厂的量产供应链。 峰岹科技:自研内核的专业选手 峰岹科技是国内少数拥有完全自主知识产权处理器内核的电机控制芯片公司,其自研ME内核专为电机控制优化,主打双核/多核协同架构。 旗舰产品FU63xx系列集成电机驱动、伺服控制和位置传感器,支持17bit以上高精度控制,已在机器狗关节和人形机器人关节中批量出货。更进一步,峰岹正在研发三核架构产品,第三个核心专门用于在线参数辨识——实时估计摩擦系数、检测电机健康状态,代表了关节智能化的未来方向。 兆易创新:聚焦全栈方案 兆易创新(GigaDevice)凭借”MCU+存储+模拟”全栈方案在关节模组市场快速占位。GD32H75E系列(Cortex-M7 @ 600MHz)最大亮点是原生集成EtherCAT从站控制器和双PHY,可节省30%的PCB面积,对多关节整机设计极具吸引力。 图:兆易创新的人形机器人产品布局(来源:兆易创新,芯查查) 此外,兆易推出的GD30DRE518 SoC将电机驱动与MCU高度集成,搭配国产高速TMR磁编码器(精度±0.025°),形成了完整的一体化关节驱动方案,已在业内头部机器人企业得到验证。 极海半导体:聚焦实时控制 极海半导体(Geehy)推出的G32R501是基于Arm Cortex-M52双核架构的实时控制MCU/DSP,主频400MHz,内置硬件加速器可将FOC算法执行时间压缩至2.8μs,配备32通道100皮秒高分辨率PWM和4路16位SAR ADC,已构建起“G32R430编码器芯片+G32R501主控+GHD3440栅极驱动”的完整感控驱全链路方案。 国民技术:基于M7+M4双核 国民技术推出的N32H7系列是一款Arm Cortex-M7+Cortex-M4双核高性能MCU,M7核主频600MHz负责实时控制,M4核300MHz负责通信与状态管理,双核协同实现单芯片多任务。100皮秒高分辨率定时器支持SiC/GaN功率器件驱动,已在越疆Rover X1等协作机器人中批量应用。国民技术还推出了灵巧手参考方案,使用1颗N32H7+4颗N32H4实现了22自由度控制。 先楫半导体:EtherCAT集成先行者 先楫半导体的HPM6E8Y系列(双核600MHz,含EtherCAT从站控制器)是国产芯片中最早实现EtherCAT硬件集成的方案之一,已切入宇树、优必选等头部机器人企业的关节驱动模块。在人形机器人关节控制解决方案中,先楫重点强调微秒级多关节协同控制能力,是国产EtherCAT关节主控的代表性方案。 雅特力科技:宇树验证的量产方案 雅特力科技的AT32F415(Cortex-M4 @ 150MHz,QFN 4×4mm封装)已被宇树科技在量产型人形机器人的电机驱动单元中实际采用,是目前少数能明确证实“已进入量产人形机器人关节模组BOM”的MCU之一。 其AT32F435(Cortex-M4 @ 288MHz)是MCU中主频最高的方案之一,AT32F403A则专注力矩传感器数据采集与关节伺服协同,三款芯片构成”感知+主控+高速控制”的完整关节方案。 新唐科技:AI+控制的创新融合 新唐科技在人形机器人关节领域的独特优势在于其M55M1系列——将Arm Ethos-U55 NPU集成进Cortex-M55 MCU的产品,使得关节MCU本身就具备CNN/RNN推理能力,可实现关节状态预测、故障检测等边缘AI应用,无需依赖上层AI SoC。据芯查查了解,新唐正积极进入Figure AI等美系机器人厂商的供应链视野。 FPGA:高端关节的另一条路 虽然现在关节模组的主控方案主要选择MCU,但在量产主流方案之外,FPGA在关节模组中也有其不可替代的价值,尤其适合对实时性、并行性和确定性要求极高的高端场景。 FPGA最擅长的是将”时间敏感、并行度高”的任务硬件化:高分辨率PWM生成(纳秒级精度,几乎无抖动)、多路编码器并行解码(AB相、SSI、BiSS-C同时处理)、ADC采样时序精密对齐、EtherCAT/TSN通信实现,以及硬件级安全链路响应——这些任务用FPGA实现,延迟比MCU低一到两个数量级。 实际工程中,更常见的是”MCU+FPGA”或”SoC FPGA”混合方案:MCU承担FOC算法和状态机,FPGA承担时序关键的外设处理。AMD/Xilinx的Zynq系列(Arm+FPGA)和Microchip的PolarFire SoC FPGA(RISC-V+FPGA,代表型号MPFS095T)是两大主流平台。 Lattice的Certus-N2系列则以超低功耗FPGA为特色,适合空间和能耗双重受限的小型关节。 关节模组的主控芯片选型矩阵 说了这么多型号,真到画板子的时候怎么选?我们按关节的具体应用场景,把这些芯片重新梳理了一遍,整理成下面这张表。对号入座,一目了然。 图:人形机器人关节模组主控芯片选型参考(来源:芯查查) 结语 人形机器人这波热潮,正在倒逼芯片厂商做这四件事:一是高集成(驱控传一体),以前是“MCU + 驱动 IC + 编码器解码芯片”三大件,现在基本都在往一个 SoC 里集成,以节省PCB面积,降低成本;二是算力下沉,以前关节只负责执行,现在TI、ST、新唐、恩智浦等都在往MCU里面加NPU模块,以后关节自己就能做状态预测、摩擦补偿和寿命预警了,上位机只需要发布宏观指令;三是功能安全成为硬门槛,人形机器人如果想要进入养老院、家庭等场景,IEC 61508 / ISO 13849 这些安全认证绝对会从“加分项”变成“一票否决项”;四是国产替代进入深水区,以前国产 MCU 只能在低端小关节里打转,现在峰岹、兆易、先楫这些厂,不仅性能追上来了,还在 EtherCAT 集成、双核架构上玩出了花样。从“能用”到“好用”,国产芯片正在成为很多本体厂的首选。 对于硬件工程师来说,面对这眼花缭乱的芯片型号,从来就没有绝对“最好”的芯片,只有“最合适”的芯片。在实时性、BOM 成本、开发生态和量产可靠性之间,精准地切中那个平衡点,才是体现工程师最大价值的地方。 当然,如果你想了解更多人形机器人的解决方案,4月23日,在FAIRplus2026机器人全产业链接会期间,芯查查联合深圳市机器人协会将主办 “下一代机器人智能核心——‘大小脑’与关键器件创新论坛” ,邀请了阿加犀、NXP、ADI、molex、瑞萨、江波龙、中电港萤火工场等合作伙伴的技术大咖,深度解码机器人“大小脑”与关键器件的前沿技术与应用。到时,文章中提到的一些原厂将会具体介绍他们的人形机器人相关解决方案。欢迎所有工程师到现场交流。
机器人
芯查查资讯 . 2026-04-13 6783
- 1
- 36
- 37
- 38
- 39
- 40
- 500