

纳秒级抖动×24小时零丢帧:RK3576工业级EtherCAT主站全拆解
前言:从"通用"到"硬实时"的那堵墙 在工业自动化现场,我们时常听到这样的抱怨:"明明 Linux 上跑个 EtherCAT 主站协议栈很简单,可一到多轴联动、精密组装这类场景,周期一不小心就'飘'了,轨迹抖得让人心慌。" 问题就出在"硬实时"三个字上。要在通用操作系统上实现微秒级的确定性与低抖动,一直是机器人、多轴运动控制、半导体设备等高精度场景落地的关键挑战。 开源界的明星——IgH Ethe
嵌入式
米尔 . 2026-06-01 469

RK3506工业网关:如何打通现场采集、无线传输与行业规约接入?
这不是单纯的产品介绍,而是一次围绕工业网关核心任务展开的技术验证。测试平台选用米尔电子 MYD-YR3506 开发板,搭载 MYC-YR3506 核心板,基于瑞芯微 RK3506 处理器与 Ubuntu 22.04 环境,对 Modbus 采集、MQTT 上云和 IEC104 规约交互三条链路进行了完整验证。 处理器架构:3×Cortex-A7 + 1×Cortex-M0 操作系统:Ubuntu
嵌入式
米尔 . 2026-05-28 595
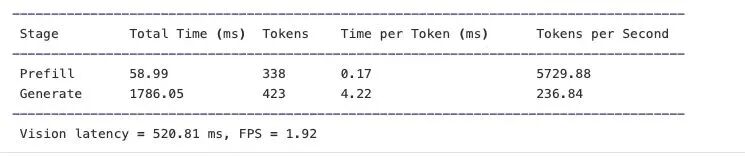
产品 | 端侧OCR开启大模型时代,瑞芯微RK182X实测PaddleOCR-VL优势突出
过去,端侧OCR普遍采用小模型方案,这类模型虽然能在低功耗设备上运行,但存在明显的性能瓶颈如精度有限、泛化能力弱、缺乏语义理解等。随着多模态大模型技术成熟,OCR正在从小模型的“图像匹配”时代,迈向大模型的“语义理解”时代;从“识字”到“懂文档”理解空间语义关联,抗干扰能力提升,对复杂场景识别准确率以及泛化能力增强,这些都意味着端侧OCR迎来能力跃迁。 RK182X跑通PaddleOCR-VL:端
瑞芯微
瑞芯微电子 . 2026-05-25 1 1533

基于米尔RK3576核心板的工业机器人控制器应用方案
一、工业机器人控制面临的挑战 在智能制造与工业4.0背景下,工业机器人对控制器的实时性、算力与稳定性提出了严苛要求。传统控制器在面对同步定位与建图(SLAM)、自主导航及多传感器融合等复杂任务时,常面临算力瓶颈与开发周期长的痛点。米尔电子推出的RK3576核心板,凭借其高性能计算单元与丰富的接口资源,为构建新一代工业机器人控制器提供了理想平台。 二、RK3576核心板:工业机器人的算力基石 米
嵌入式
米尔电子 . 2026-05-14 1022

RK3576 MIPI Camera ISP调试:客观标定与环境准备(上)
概述 在使用未集成 ISP 的摄像头模组进行系统开发时,ISP(Image Signal Processor,图像信号处理器)调试是决定成像质量的核心环节。ISP 作为相机系统的"大脑",负责对前端图像传感器输出的原始信号进行后期处理。由于硬件物理特性的局限性以及人眼视觉感知的差异性,必须通过去卷积、校正、增强等算法流水线,使相机最终输出的图像在亮度、色彩、清晰度等方面达到最优效果。本文基于米尔R
嵌入式处理器
米尔 . 2026-05-11 868

2秒启动系统 · 资源受限下HMI最优解,米尔RK3506开发板× LVGL Demo演示
最近团队在评估RK3506做新一代工业HMI方案,踩了不少坑,今天聊点干货。为啥最终选了LVGL而不是Qt?下面说点大实话。 一线开发者的扎心时刻 痛点1:存储和内存被“吃空” RK3506 本身就是为低成本、高性价比设计的方案,板级内存和 NAND 容量都不会给得太奢侈。在这种资源有限的平台上,Qt 方案过于臃肿,一个基础界面就能把内存占掉一大截,再叠上业务逻辑和后台服务,压力直接拉满。很多低成
HMI
米尔电子 . 2026-05-06 1 777
机器人主控平台米尔RK3576 + ROS2,目标跟随与机械臂抓取实战演示
回顾上篇:基于RK3576+ROS2 Humble+SLAM Toolbox+Nav2,我们实现了机器人的建图与自主导航。机器人已经能够“走到哪里”。但真正的智能机器人不仅要“走到哪”,还要“看到并操作”——识别特定物体、主动跟随、近距离抓取。本文将在此基础上,集成深度摄像头,实现机器人核心功能: 使用米尔RK3576 NPU加速MixFormerV2进行目标跟踪,替代传统OpenCV算法; 移动
嵌入式
米尔电子 . 2026-04-15 1708

当6 TOPS不再是极限:RK3576+Hailo-8,让高帧率摄像头真正“实时”
在边缘计算领域,算力与实时性之间的博弈从未停止。近期基于米尔MYD-LR3576 开发板+PCIe M.2接口Hailo-8算力卡进行了一系列深度测试,一组实测数据,或许能帮你重新审视边缘AI的“性能天花板”。 米尔基于RK3576开发板 一、RK3576的算力极限在哪里? RK3576内置NPU由2核组成,具备6 TOPS 算力,在常规轻量级模型推理中表现不俗。但在实际项目中,我们通过多路并
嵌入式
米尔 . 2026-04-03 1239

米尔RK3576 + ROS2 SLAM建图与导航实战
前言 文档定位与目标读者 本文档面向具备一定ROS基础、希望深入理解并在实际项目中部署ROS2 Humble + SLAM Toolbox + Nav2完整建图与导航系统的机器人工程师。我们将从零开始,基于米尔RK3576开发板逐步构建一个功能完备的自主移动机器人系统,涵盖环境搭建、机器人建模、SLAM建图、自主导航以及生产级系统的优化与排错。 为什么选择SLAM Toolbox + Nav2
瑞芯微
米尔 . 2026-03-13 1645

基于米尔RK3576开发板的摄像头目标检测方案
本文基于米尔MYD-LR3576开发板,详细记录了如何利用500万像素USB摄像头实现640×640分辨率的YOLO5s目标检测,并将结果实时输出至1080P屏幕的全流程。通过系统级的软硬件协同优化,最终将端到端延迟控制在40ms以内,实现了 20FPS的稳定实时检测性能。文章重点剖析了摄像头特性分析、显示通路选择、RGA硬件加速、RKNN NPU集成等关键技术环节,为嵌入式AI视觉系统的开发与调
瑞芯微
米尔电子 . 2026-02-12 1 3339

ROS2 Humble生态系统体验-基于米尔RK3576开发板
当RK3576的强劲“大脑”(四核A72+四核A53)与强大的GPU、VPU、NPU加速模块相遇,一场高性价比的机器人开发革命正在悄然发生。我们成功将完整的Ubuntu 22.04与ROS2 Humble生态系统,完美移植到了这颗国产芯片上。一个稳定、全功能的机器人软件开发平台已经就绪,现在就来一起探索它的强大魅力! 一、系统启动与基础性能展示 1. 硬件平台简介 开发板:MYD-LR3576
瑞芯微
米尔电子 . 2026-01-20 2079

基于米尔RK3506核心板的三核A7实时控制新架构
在工业控制与边缘智能领域,开发者的核心需求始终明确:在可控的成本内,实现可靠的实时响应、稳定的通信与高效的开发部署。米尔电子基于RK3506处理器打造的MYC-YR3506核心板平台,近期完成了一次以“实时性”和“可用性”为核心的SDK战略升级,致力于将多核架构的潜力转化为工程师可快速落地的产品力。 本次升级围绕两大主线展开:系统生态的多样化与实时能力的深度释放。我们不仅提供了从轻量到丰富的操作系
瑞芯微
米尔电子 . 2025-12-22 2457
360环视实时性评估:GPU加速性能与AI拓展潜力-基于米尔RK3576
一、项目背景与测试平台 本次360环视系统原型基于米尔电子MYD-LR3576开发板进行构建与评估。该开发板所搭载的瑞芯微RK3576芯片,集成了4核Cortex-A72、4核Cortex-A53、Mali-G52 GPU及高达6TOPS算力的NPU。本文旨在通过实际测试数据,从功能实现、实时性能与AI拓展潜力三大核心维度,为客户提供一份关于该平台在360环视应用中能力的真实参考。 二、系统流
瑞芯微
米尔电子 . 2025-12-11 1 2226

RK3576在智能工程机械中的应用|三屏八摄AI视觉解决方案
米尔RK3576开发板以三屏异显与八摄像头输入为核心优势,为工程机械智能驾驶舱、远程监控和AI视觉系统提供高性能解决方案。
RK3576
原创 . 2025-11-11 2240

基于米尔瑞芯微RK3576边缘计算盒如何搭建驱动菜品识别模型
❝ 在人工智能与边缘计算深度融合的今天,将AI模型高效部署于终端设备已成为产业智能化的关键。本文将分享基于米尔MYD-LR3576边缘计算盒子部署菜品识别安卓Demo的实战经验。该设备凭借其内置的强劲瑞芯微RK3576芯片,为视觉识别模型提供了充沛的本地AI算力,成功将“智慧识菜”的能力浓缩于方寸之间,充分证明了其作为边缘AI应用坚实载体的卓越性能与可靠性。 ❝ 本文以米尔电子的MYD-LR357
瑞芯微
米尔 . 2025-11-06 3766
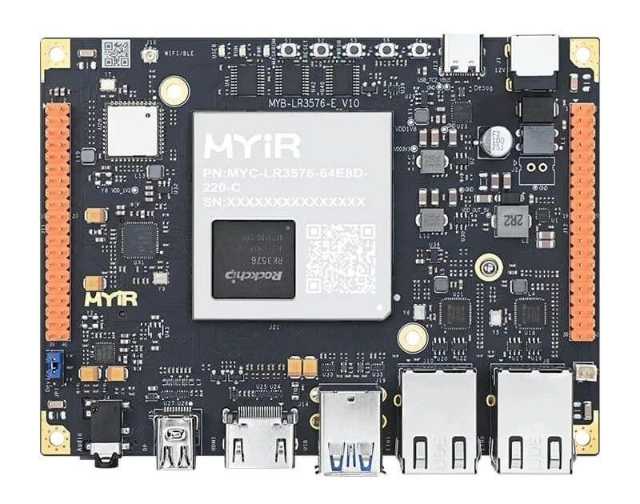
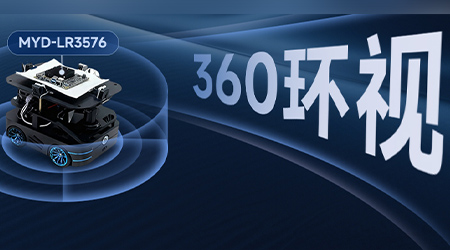
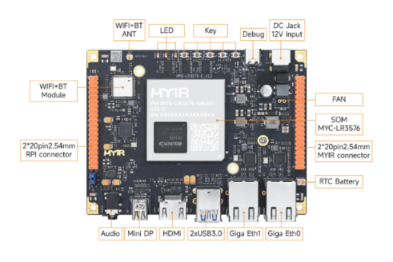
EtherCAT Igh如何移植到米尔RK3576开发板上
本文将介绍基于米尔电子MYD-LR3576开发板(米尔基于瑞芯微 RK3576开发板)的板端移植EtherCAT Igh方案的开发测试。摘自优秀创作者-EPTmachine 米尔基于瑞芯微RK3576开发板 EtherCAT IgH需要保证高实时性,Preempt-RT是一种针对实时性能进行了优化的Linux内核。与普通的Linux内核相比,Preempt-RT具有以下优势: 实时性能
RK3576
原创 . 2025-10-09 2247

基于米尔瑞芯微RK3576开发板实测4路YOLOv8视频流
在科技飞速发展的当下,人工智能与边缘计算的融合正以前所未有的速度重塑着我们的生活。RK3576芯片拥有4核Cortex-A72以及4核Cortex-A53提供基础算力,6TOPS算力NPU来模型推导运算。使用YOLOv8模型时也是手到擒来,接下来随着步伐看看它表现如何。 YOLO简介 YOLO(You Only Look Once)是当前业界领先的实时目标检测算法系列,以其速度和精度的完美平衡而闻
嵌入式
原创 . 2025-09-25 5922
12 路 1080P 满负载!米尔 RK3576 补全车载 360° 全景影像视野
对车载 360° 全景影像来说,“看得全” 是基础,“看得清、看得快” 才是核心 —— 而这一切的关键,在于硬件能否扛住多路高清视频流的实时处理压力。米尔电子基于瑞芯微 RK3576 打造的开发板,以12 路 1080P@30fps 高清视频流满负载处理能力为核心,搭配低延迟传输、硬件级编解码与 AI 算力,直接解决传统全景影像 “视角覆盖不全、画面延迟卡顿、细节模糊” 三大痛点,成为车载视觉系统
瑞芯微
原创 . 2025-09-12 5768
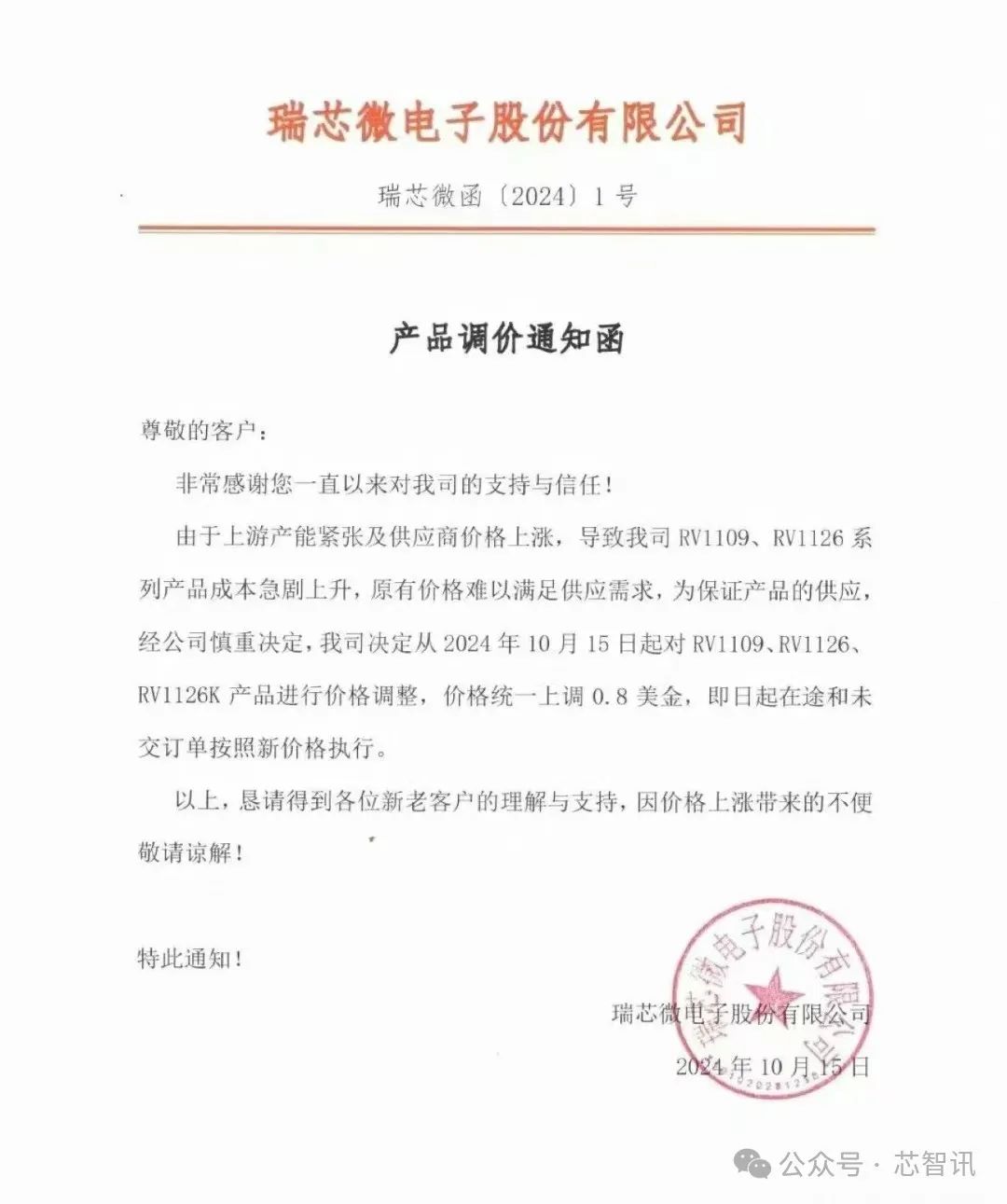
瑞芯微宣布对旗下多款IPC芯片涨价
10月16日消息,国产处理器厂商瑞芯微电子于10月15日向下游客户发出“产品调价通知函”,宣布将对旗下多款IPC(网络摄像头,Internet Protocol Camera)芯片进行涨价。 根据“产品调价通知函”显示,此番涨价是由于上游产能紧张及供应商价格上涨,从而导致了相关产品的成本急剧上升,原有价格难以满足供应需求,为保障产品的供应,因此对RV1109、RV1126、RV1126K的价格
瑞芯微
芯智讯 . 2024-10-17 1 1 5740

RK3588J正式发布Ubuntu桌面系统,丝滑又便捷!
本文通过创龙科技TL3588-EVM工业评估板(基于瑞芯微RK3588J)的硬件平台进行演示。为了简化描述,本文仅摘录部分方案功能描述与测试结果。
创龙科技
创龙科技 . 2024-08-13 6146
- 1
- 2