重点内容速览:
1. 飞控系统主要构成部件
2. 低空飞行器主控芯片谁主沉浮?
芯查查结合市场公开数据统计,2023年我国低空飞行器总体市场规模约为1820亿元,其中,无人机(含民用与军用)产业规模为1300亿元,是绝对的主力,其中民用无人机市场规模为1174.3亿元;通用航空器市场规模约为510亿元;eVTOL市场规模接近10亿元,虽然基数较小,但已经展现出了惊人的增长潜力。
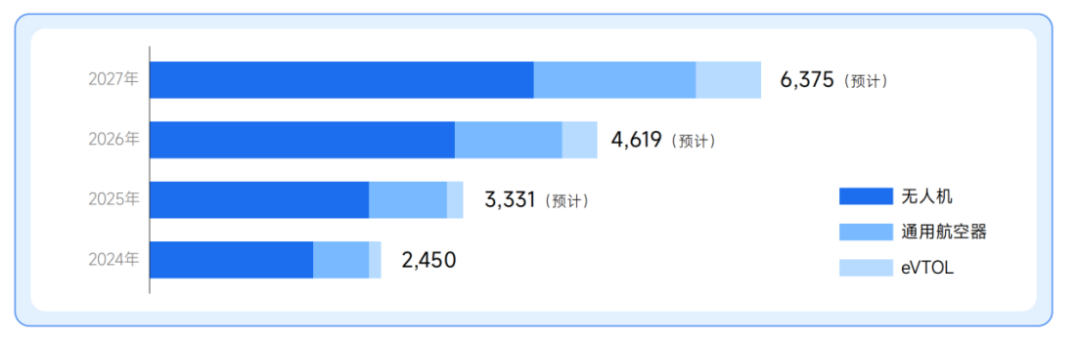
随着技术的不断突破和商业化落地的加速,未来三年低空飞行器市场预计将迎来爆发式增长。据统计,2024年中国低空飞行器的市场规模约为2,450亿元,其中,无人机1,755亿元;通用航空器663亿元;eVTOL约为32亿元;2025年市场规模预计可达3,331亿元;预计2027年会增长至6,375亿元。
也就是说,我国低空飞行器市场正处于一个历史性的黄金发展窗口期,从当前的千亿级市场起步,未来十年将迈向数万亿级的产业规模,不仅将重塑交通运输与社会服务的形态,更将成为推动我国经济高质量发展的新质生产力典范。
飞控系统主要构成部件
飞控系统是低空飞行器的领航员,相当于人的眼睛和大脑,它控制着低空飞行器的飞行姿态和航向。一般来说,飞控系统由硬件和软件两部分组成。
硬件方面,从上图中的飞控系统硬件架构图可以看出,其核心就是微控制器(即主控),再通过串行总线(例如SPI、I2C、或UART等)扩展连接高精度传感器,主要由陀螺仪(用来感知飞行姿态)、加速度计、气压计、GPS、指南针模块(可选配),以及无线通信模块、控制电路、ESD保护与存储等组成。飞控系统可以通过陀螺仪或IMU(惯性测量单元)等传感器,感知飞行器的状态,然后通过控制系统算法和导航算法,按照一定的控制输入信号,实现精准的定位、悬停和平稳飞行等运动。
软件方面,低空飞行器的飞控固件有两类,即开源和闭源。流行的开源飞控系统包括Betaflight、APM(ArduPilot)、PX4、Open Pilot的CC3D、Sparky和MultiWii的各种变种。这些项目有一个共同点:任何人都可以下载所需的构建文件和软件,制作自己的变种。有些国内公司的飞控系统就是基于这些开源系统构建的。
闭源的飞控系统有各种各样的配置。较为流行的有大疆(DJI)的Wookong和Naza以及X-Aircraft的Super-X和Mini-X等。这些系统通常是专利系统,用户不能自行修改软件代码。
低空飞行器主控芯片谁主沉浮?
飞控系统的主控芯片就是低空飞行器的“大脑”,负责实时处理传感器数据、执行飞行算法、导航算法、以及与外围设备(例如电机、IMU、GPS等)的交互。随着AI集成、自主飞行和5G通信的兴起,主控芯片的选择越来越注重高性能、低功耗和边缘计算能力。主流的供应商包括ST、高通、NVIDIA和安霸等。值得注意的是主控芯片往往与飞控板(例如Pixhawk或Betaflight兼容板)集成使用,需要的时候,需要考虑兼容性和功耗预算。
穿越机(FPV)与 DIY无人机市场FPV无人机飞控系统正在快速迭代,供应商越来越多地选择采用性能更强的处理器和硬件,且整个系统正朝着微型化、功能集成化方向发展。这个市场的主流是使用基于Arm Cortex-M内核的32位MCU,其中,ST是这个市场的绝对领导者。
ST的STM32系列MCU很多都有在穿越机和DIY无人机上有使用。Betaflight、Emuflight、Cleanflight 等飞控软件也都可以在STM32系列MCU上运行。据芯查查统计,ST的H7、F7、F4、G4、F3、F2、F1和F0等多个子系列都有被飞控系统厂商采用。这些不同型号的MCU产品的主要区别在于内部架构、时钟频率、内部闪存容量和外设接口数量等方面。
STM32F1系列MCU是ST于2007年发布,最常用的型号是STM32F103CBT6,它具有128KB固件存储空间。在2012至2013年间,F103凭借运行OpenPilot的CC3D和运行Baseflight的Naze32得以在无人机领域普及。不过,由于时钟速率低、存储固件的内存不足、缺乏浮点加速硬件,以及UART接口数量不足等硬件限制,F1飞控现在已经被视为过时产品。Betaflight等大多数固件在2017年停止了对F1系列MCU的支持,最终支持版本为Betaflight 3.2。
STM32F3系列MCU于2012年发布,其核心频率最高可达72MHz,通用闪存容量最大为256Kb,该系列与STM32F1系列几乎实现了引脚兼容,但其时钟频率更高,且配备了3个串行端口用于外设连接。该系列在2014年首次应用于飞控平台。不过,随着Betaflight固件的不断升级,F3处理器最终也因为资源耗尽无法满足市场需求,而且Betaflight在2019年停止了对F3系列MCU的支持,最终支持版本为Betaflight 4.0。
STM32F4系列MCU于2011年发布,实际上市时间也早于STM32F3系列,其时钟频率略高,最高可支持32KHz周期时间运行。比较受欢迎的STM32F4系列MCU是主频为168MHz的STM32F405RGT6和主频为100MHz的STM32F411CCU6,前者性能更强,但体积较大,通常应用在尺寸更大、更高端的飞控上。F411由于封装尺寸更紧凑,常用于小型或经济型飞控。
除了ST,也有不少国内MCU厂商的产品应用在了无人机上,比如兆易创新的GD32系列、雅特力的AT32系列、小华的HC32F4A0系列等。
兆易创新的GD32系列是STM32的主要替代者,其GD32F4xx系列MCU采用Arm Cortex-M4内核,主频高达240MHz,具备快速的实时处理能力,可支持算法复杂度高,而且还集成了多种高性能的工业标准接口。更重要的是,目前GD32F4xx系列已经打通了Betaflight相关平台。
图: 雅特力AT32F435在无人机飞控上的应用(来源:雅特力)雅特力的AT32系列MCU最大的优势是价格,但其功能与性能也不输于STM32系列产品。其在飞控中比较常见的产品是AT32F435,该芯片的性能介于STM32F405和F722之间,运行频率为288MHz。虽然它与STM32F4系列同属于M4内核,但凭借更高的时钟频率和RAM,其性能可媲美STM32F7系列的M7大核。此外,由于其更小的封装尺寸,AT32F435在微型穿越机领域也成为STM32F411的优质替代方案。当然,处理器的速度是不能直接比较的,还需要考虑浮点运算单元的差异和精度等级。虽然STM32F7系列MCU确实具备双精度浮点单元,但对穿越机的实际影响微乎其微。但值得注意的是,AT32系列在穿越机FPV领域仍相对较新,这意味着,存在驱动程序和Betaflight兼容性等挑战。不过,现在AT32系列MCU正逐渐被许多主流的无人机固件所支持。
小华的HC32F4A0系列采用Arm Cortex-M4内核,主频同样也为240MHz,具有2MB大容量闪存和516KB SRAM,最大支持32个通信接口,其中包括10个USART、6个SPI、6个I2C、2个CAN等。
工业级无人机与开源飞控 (Pixhawk / ArduPilot)
工业级无人机常用于农业、测绘、巡检等专业领域,对可靠性、稳定性和精度要求极高。主控芯片也必须是工业级或更高规格,能够在宽温、高振动、强电磁干扰环境下稳定工作。飞控系统通常采用冗余设计,可能包含多个主控芯片和传感器进行相互备份。该领域也常使用基于PX4或ArduPilot开源固件。在该市场ST仍然是核心供应商之一,其STM32F7/H7/F4系列是该领域的首选。
STM32F7系列MCU于2014年推出,其核心频率最高可达216MHz,通用闪存容量最高达2048Kb。该系列与STM32F4系列保持引脚兼容性。飞控中使用的F7系列MCU有多个不同型号,其中STM32F745因其主频和大内存成为常见选择。然而,较大的封装尺寸使其难以在有限空间内集成所有所需功能。STM32F722作为更小型化且经济实惠的选项,仍具备运行当前 Betaflight 版本的充足性能,因此成为飞控领域最受欢迎的F7芯片,最常用的型号是STM32F722RET6,具有512Kb闪存、128Kb RAM和5个硬件UART接口。STM32F765是飞控史上性能最强的F7处理器,但其封装尺寸最大且成本最高,这使得它成为相对小众的处理器选择。值得一提的是,F7的一大优势是可用UART接口数量更多,且所有的UART均内置了信号反转功能,这对使用FrSky接收机的飞手更为友好。
STM32H7系列MCU于2017年发布,旨在作为F7系列更快速且更具成本效益的替代品。其制造工艺从90nm改进至40nm,主频可达480MHz,同时降低了功耗。由于内部闪存容量减小(采用了更便宜的外部存储器替代),H7系列的成本较F7系列更低。多款 H7 系列芯片被应用于飞控。首款基于 H7 的飞控由 Seriously Pro Racing 推出,命名为 H7 EXTREME。其搭载的 STM32H750 处理器是 H7 系列中成本最低、体积最小的型号,仅配备 128kB 闪存(与 F1 相当)。这一存储容量不足以容纳 Betaflight 代码,因此解决方案是将代码存储于外部存储器(如 SD 卡)中。飞控通电时,代码会被载入 RAM 运行。更新 Betaflight 固件仅需替换 SD 卡中的固件文件,彻底规避了 DFU 驱动问题。尽管这种设计在业内较为罕见且非主流,但这仍不失为一种创新且独特的解决方案,有效应对了 H7 最小型号闪存容量受限的挑战。
恩智浦也是工业级无人机市场的一个主流飞控系统主控供应商,其i.MX RT1170是一款跨界双核MCU,集成了Arm Cortex-M7和Arm Cortex-M4内核,具有实时性能和高集成度。其M7内核的运行频率高达1GHz,M4内核的运行频率为400MHz,具有2MB的片上RAM。高性能的M7内核可处理飞控算法和视觉识别,M4内核则可以实时控制电机,实现更稳定的飞行性能。
eVTOL的飞控系统主控芯片
在eVTOL领域,是不能使用没有功能安全认证的处理器来做主控的,因为标准的MCU无法应对“随机硬件失效”问题,因此,eVTOL必须使用“功能安全认证”至少需要达到ASIL-D级别,这类芯片的核心特征是,不仅能够完成计算,还能时刻“自检”是否算错了。其核心技术就是锁步内核,原理是芯片内部集成两个完全相同的CPU内核(例如两个Cortex-R5),在同一个时钟周期内,运行同一条指令。芯片上还有一个硬件“比较器”,实时对比两个内核的输出结果。只要结果不一致(哪怕是只错了一个bit),比较器就会在几纳秒内检测到,并立即触发“故障”中断,系统便知道出错了,从而启动安全保护。
主流的供应商包括英飞凌、恩智浦、TI、瑞萨、AMD与Microchip的异构方案等。
英飞凌的代表型号是AURIX系列,包括TC3xx与TC4xx。AURIX的TriCore架构从设计之初就是为ASIL-D而生,其多核加锁步核的架构、完善的文档支持,使其成为全球汽车和新兴eVTOL厂商的首选。
恩智浦的S32平台,例如S32K3、S32R、S32Z/E等型号。恩智浦是跨界处理器的重要玩家,它将其在汽车电子领域的深厚积累带入了低空经济领域,其S32平台基于高性能的Arm Cortex-R52内核,同样也具有锁步架构。其巨大的优势是集成了TSN(时间敏感网络)以太网控制器,完美契合了分布式飞控趋势。
TI的Hercules TMS570系列是一款经典且可靠的处理器产品。TMS570基于双核锁步的Cortex-R4/R5,是工业和汽车安全领域的常用选择。虽然性能不是最好的,但其稳定性和成熟度是其最大的优势。
瑞萨的RH850/U2B系列是跨域汽车微控制器,配备了4个400MHz CPU内核,以及3个双核锁步。每个CPU内核都集成了虚拟支持和服务质量(QoS)功能,适用于X-in-1应用程序。同时,RH850/U2B 配备了最新硬件支持技术,可将多个 ASIL-D 软件分区整合到同一电子控制单元(ECU)中,并确保同时运行的应用程序之间不会相互干扰,满足 ISO 26262 ASIL D 标准。
AMD与Microchip的异构方案也是一个选择。例如采用AMD的Zynq UltraScale+MPSoC与Microchip的PolarFire SoC相结合的方案。这类SoC+FPGA异构的方案,允许客户实现异构冗余,即一个Arm Cortex-A/R核与一个在FPGA上实现的MicroBlaze或RISC-V核同时运行。可以防止“共模故障”,万一Arm的Cortex-R52内核本身存在一个设计缺陷,或编译器有一个Bug,那么所有的冗余FCC(如果是同构的)都会在同一时刻集体失效。而使用两种完全不同的CPU架构,可以避免这种灾难。
自主飞行无人机
近年来,无人机发展的核心驱动力之一是人工智能(AI)技术的深度融合。为了在机载端实时处理海量数据并执行智能任务,在主控芯片中集成专用的AI加速硬件已成为不可逆转的趋势。
一些采用异构计算架构(即在一颗SoC上集成CPU、GPU、NPU、DSP、ISP等多个专用处理单元)的无人机主控已经出现。例如高通的跃龙QCS6490、QCS8550等芯片平台;NVIDIA的 Jetson TX1/TX2系列SoC;海思的Hi3559C系列等。
高通跃龙QCS6490芯片平台采用6nm制程,搭载8核Kryo 670 CPU(包含4个高性能Cortex-A78核心和4个能效比优异的Cortex-A55核心),在实现2.7GHz高频算力的同时,保持了出色的功耗平衡;其集成的第六代高通AI Engine,配合Hexagon处理器与融合AI加速器,可提供高达12TOPS的AI算力,为复杂模型的实时推理提供强大支持。此外,QC6490支持企业级WiFi 6/6E,具备多千兆位的数据传输速率与超低延迟特性,搭配高性能三重ISP(可支持5路摄像头并发及192MP图像捕捉),为多源视觉数据的高效处理与传输奠定了基础。
在无人机领域,QCS6490赋能无人机突破传统飞行限制,在电力巡检中,可通过多摄像头同步采集输电线路图像,实时运行目标检测与缺陷识别模型,精准定位绝缘子破损、导线断股等隐患;在农业植保场景下,能快速处理农田航拍图像,识别作物长势、病虫害区域,并结合飞行控制系统实现变量施药;而在测绘任务中,其高效的数据处理能力可支持实时拼接航拍图像生成三维地图,WiFi 6/6E的高速传输特性则确保关键数据能即时回传至地面站,保障作业安全性与时效性。
其QCS8550芯片平台采用了更先进的4nm制程,待机功耗仅 50mW,支持 24 小时连续运行,且动态功耗调节技术可降低高负载场景功耗 20%。其异构计算架构融合了CPU、GPU、NPU等,具有48TOPS的AI算力,8核高主频CPU确保了语音交互、视觉识别、动作规划等多任务并行流畅处理。可以让无人机实现更多功能。
NVIDIA的Jetson平台具有功能强大的AI计算性能,负责运行复杂的AI、计算机视觉和传感器融合算法。它本身不是实时飞控,而是向Pixhawk等主飞控发送高层指令(例如如“向左避障”)。
当然,除了上面提到的这些主控芯片型号和供应商,有些无人机头部企业也会使用高集成度的SoC或自研ASIC芯片,因为他们要将实时飞行控制、AI、计算机视觉、ISP等集成在单一平台上。例如大疆创新就有在自研ASIC芯片。
结语
无人机飞控系统的主控芯片正处在一个技术快速迭代和市场格局逐步演变的关键时期。传统上由ST的STM32系列主导的MCU市场依然稳固,尤其是在追求稳定可靠的工业级和开源领域。与此同时,以高通跃龙和NVIDIA Jetson为代表的高集成度、高AI算力的SoC平台,正在重新定义高端消费级和专业无人机的能力边界。
面向未来,主控芯片的核心竞争将围绕智能化展开。AI将不再是附加功能,而是主控芯片的基础能力。芯片将会集成更强大的NPU和更先进的算法,让无人机能够实现类似人类的场景理解、自主决策和复杂任务规划。
而随着半导体制程的进步,芯片供应商将能够把飞控、图传、数传、AI计算、电源管理等更多功能集成到单一芯片上,进一步缩小无人机电子系统的体积和重量。
当然,国产化的趋势也势不可挡,未来无人机主控也不例外,将会有越来越多的国产供应商出现。




全部评论