近年来人形机器人技术迎来爆发式增长,全球科技巨头和中国本土企业都在加速升级迭代人形机器人产品和相关技术,推动机器人在工业、物流、医疗、教育和家庭等领域的广泛应用。
而在人形机器人系统中,灵巧手被认为是极为复杂、精密和关键的执行器,成为人形机器人技术演进的核心方向之一,它不仅需要具备高自由度的运动能力,还要实现对力和位置的精准控制,以模拟人手的操作行为。
挑战:传统通信在分布式架构中的瓶颈
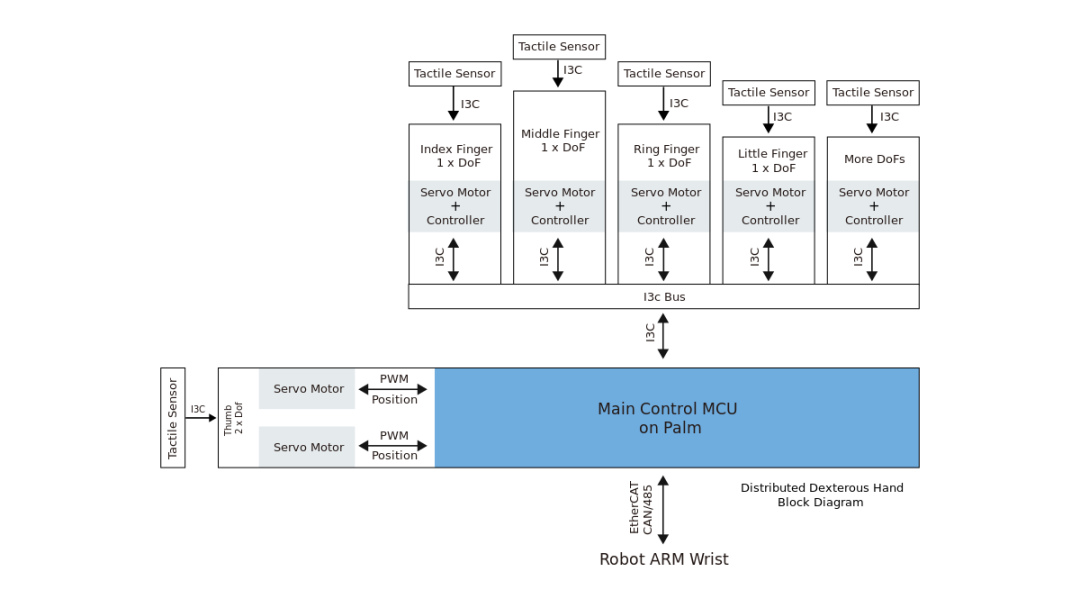
在采用分布式电气架构的灵巧手设计之中,负责每个主动自由度的电机驱动,以及分布在每个手指的触觉传感器,需要通过UART或CAN接口与手掌中央主控MCU通信。主控MCU通过CAN、RS485、EtherCAT接口接入机器人本体系统总线。
这种架构存在以下几处痛点,而这些痛点在一定程度上制约了灵巧手系统的性能提升、架构演进和轻量化小型化的发展:
带宽限制:UART/CAN通信的波特率限制了控制环路获得更高的带宽。
线束复杂:每个手指需独立布线,导致线束数量庞大,同时增加了组装难度与故障风险。
PCB空间受限:多路通信接口会占用大量PCB面积,限制系统集成度。
扩展性差:增加自由度或传感器数量时,现有通信架构难以灵活扩展。
异步通信问题:UART/CAN为异步通信,MCU需外部晶振提供高精度时钟源,增加了硬件复杂度。
解决方案:基于I3C总线的分布式通信架构
恩智浦半导体中国应用工程师团队提出了基于I3C的灵巧手内部局部总线拓扑结构,革新了灵巧手内部通信方式。
该架构采用i.MX RT1180作为机器人手掌主控MCU,采用MCX A132作为手指关节控制MCU,通过I3C总线连接多个伺服节点与触觉传感器,对外则通过EtherCAT、CAN、RS485连接到机器人系统总线。
采用灵巧手精准复现人手动作,访问恩智浦半导体官网移动机器人专题,了解恩智浦如何赋能安全可靠的移动机器人,点击访问>>
I3C总线:为分布式通信架构带来诸多优势
高速通信能力
I3C总线标准速率高达12.5Mbps,优于UART和CAN2.0,且在特定条件下支持DDR模式,理论能够高达25Mbps,满足高分辨率传感器和实时控制的高带宽需求。
简化布线与硬件设计
I3C主机仅需两根线(SDA + SCL)即可挂接多个总线从设备,减少线束数量,提升灵巧手模块化装配效率;而且无需外部收发器和高精度晶振,可节省BOM成本与PCB空间。
动态设备管理能力
I3C支持动态地址分配,设备在启动时自动识别并获取动态地址,避免静态地址冲突。同时,I3C支持热插拔(Hot-Join),单个手指模组可实现在通电状态下灵活替换。
实时事件响应机制
I3C支持带内中断(In-Band Interrupt),设备可通过SDA线直接向主机发送紧急事件或故障信号,无需额外GPIO中断线,由此进一步简化线束并提升主机响应速度。
可靠的信号完整性
在高速驱动模式下,I3C采用Push-Pull推挽驱动模式,相比传统的I2C开漏方式可以极大地提升性能,显著提高信号完整性,有利于支持更长的传输距离并增强接插件连接的可靠性。
值得一提的是,在这款人形机器人灵巧手方案中,恩智浦的多款MCU产品与I3C分布式总线架构无缝融合,相得益彰。
i.MX RT1180作为手掌中央主控MCU,其主要的特性包括:
双核架构(240MHz M33内核 + 800MHz M7内核),提供高性能处理能力;
集成2个I3C接口,可连接多个伺服节点与传感器;
支持EtherCAT、CAN-FD、UART等多种工业通信协议接口;
丰富的PWM、ADC、编码器接口,单芯片可以直驱多达8个无刷空心杯电机。
基于恩智浦MCX A132方案的机器人手指关节伺服节点和触觉传感器设计,其主要特性包括:
小尺寸封装,适合手指模块嵌入;
集成1个I3C接口,与主控实现高速通信;
内置16-bit ADC,用于触觉传感器模拟信号的高质量采集;
支持IEC 61508 SIL2功能安全自测库,满足未来人形机器人对功能安全的要求。
本文小结
恩智浦团队希望通过创新性的I3C总线拓扑设计,推动灵巧手系统向更高集成度、更强性能、更广应用场景演进。同时恩智浦i.MX RT1180与MCX A132产品组合也为这一架构提供了坚实的硬件基础,助力人形机器人技术实现新突破。
随着人形机器人在服务、医疗等领域的深入应用,恩智浦的I3C架构将为灵巧手提供更强大的通信支持与系统集成能力。



全部评论