概要
1、EUI的简单使用
2、16位ADC采样实验
3、SDM对Σ-Δ调制器输出数据采样
4、外置SRAM模拟为U盘
5、EtherCat io示例实践
一、EUI的简单使用
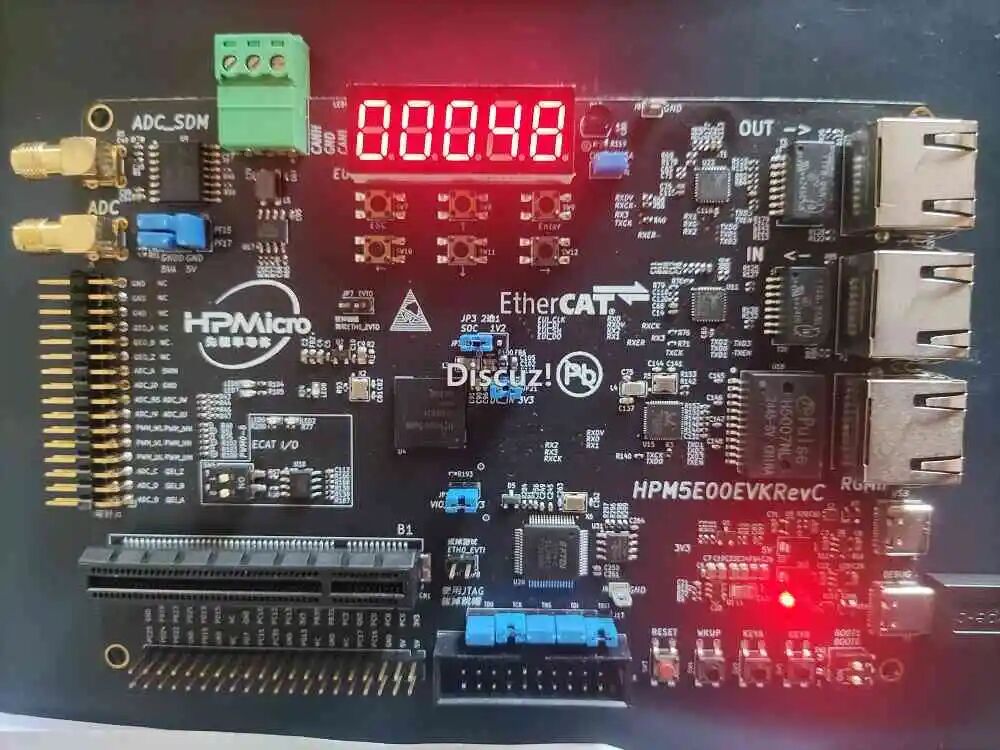
收到HPM5E00开发板后,由于SDK V1.9版本尚未支持该型号,开发板只能暂时存放在包装盒中,等待新版本发布。经过一段时间的等待,终于在7月1日收到了SDK V1.10版本发布的通知。我立即下载了最新版本,打开start_gui工具后,欣喜地发现界面中已经明确显示支持HPM5E00evk开发板。这意味着现在可以正式开始基于这款开发板的探索和开发工作了。
既然开发板上最显眼的就是LED数码管,那就从它开始探索吧。
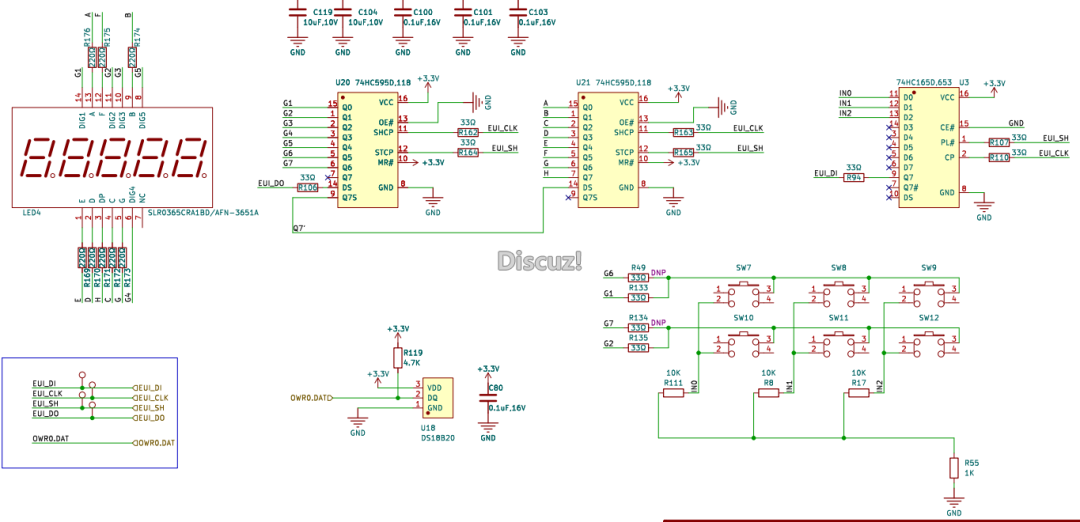
首先,我查阅了开发板的原理图,确认数码管驱动方式。接着在SDK的例程中寻找相关的驱动代码,发现官方文档中已经有了关于EUI的说明,而且已经提供了EUI的示例,这正是控制数码管显示的基础。
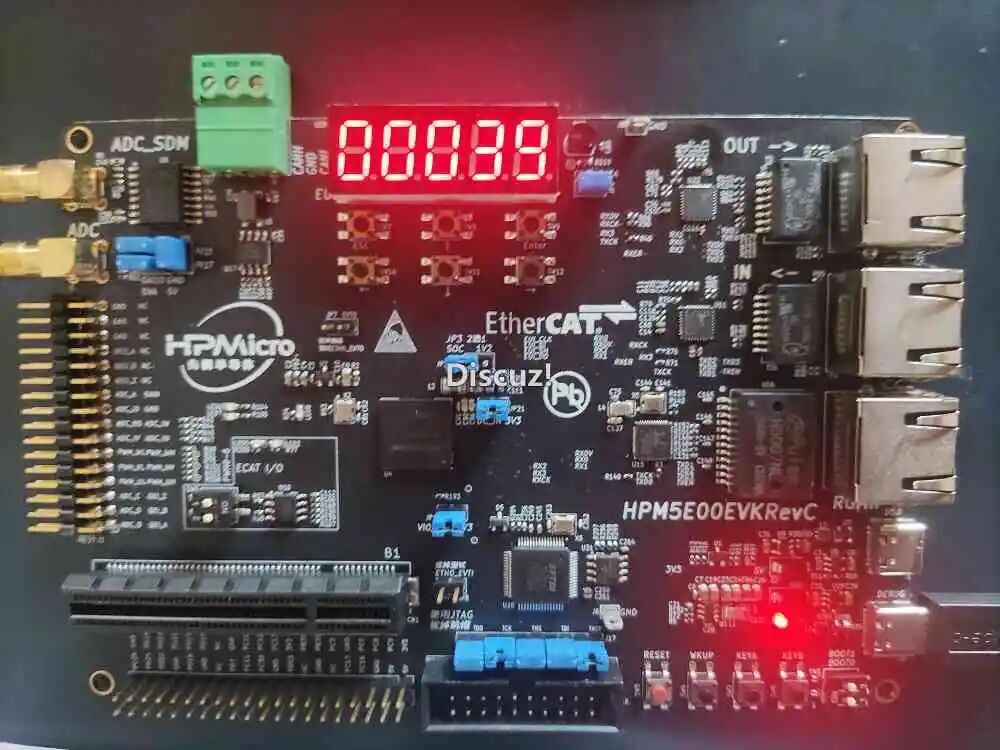
我修改了示例代码,试着让数码管显示自增数字,即每500ms数字加一。
数码管虽小,却是一个很好的切入点。通过它,可以逐步熟悉这款芯片的EUI库函数,为更复杂的开发打下基础。
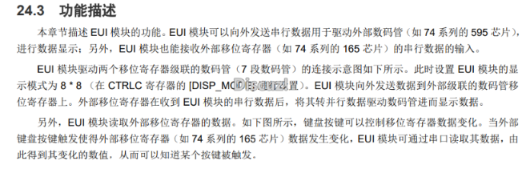
1.1 EUI功能描述
用户手册中有关于EUI的描述
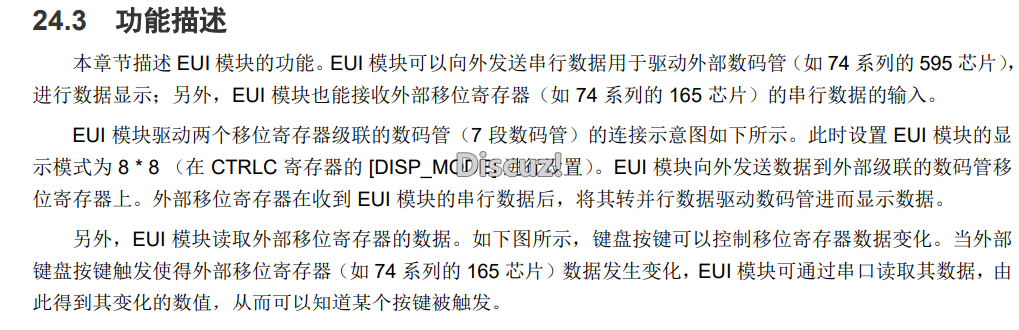
可以理解EUI是用于嵌入式系统中的矩阵键盘或LED显示控制,至于如何使用,使用好官方提供的库函数即可。
1.2 软件部分
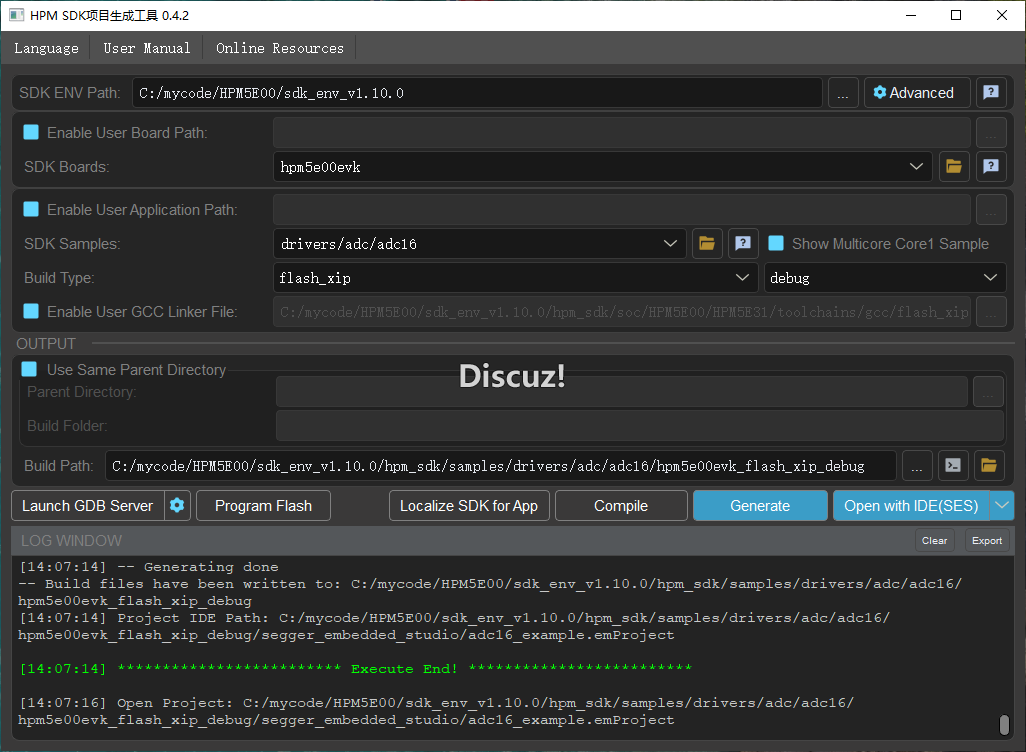
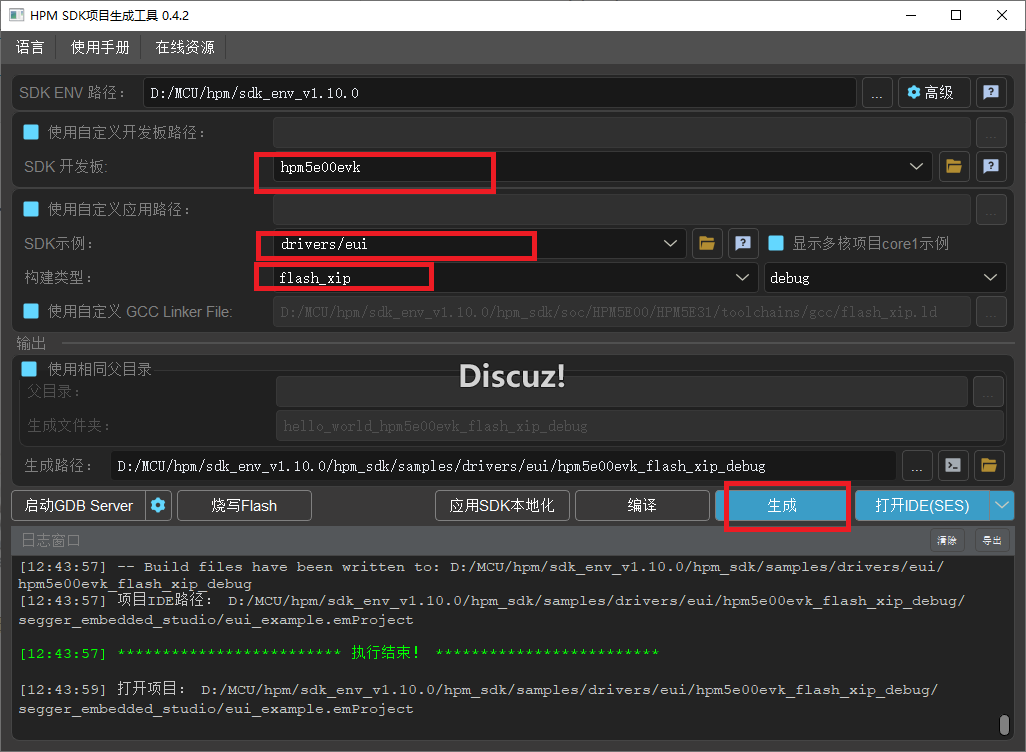
使用start_gui工具从例程中生成工程
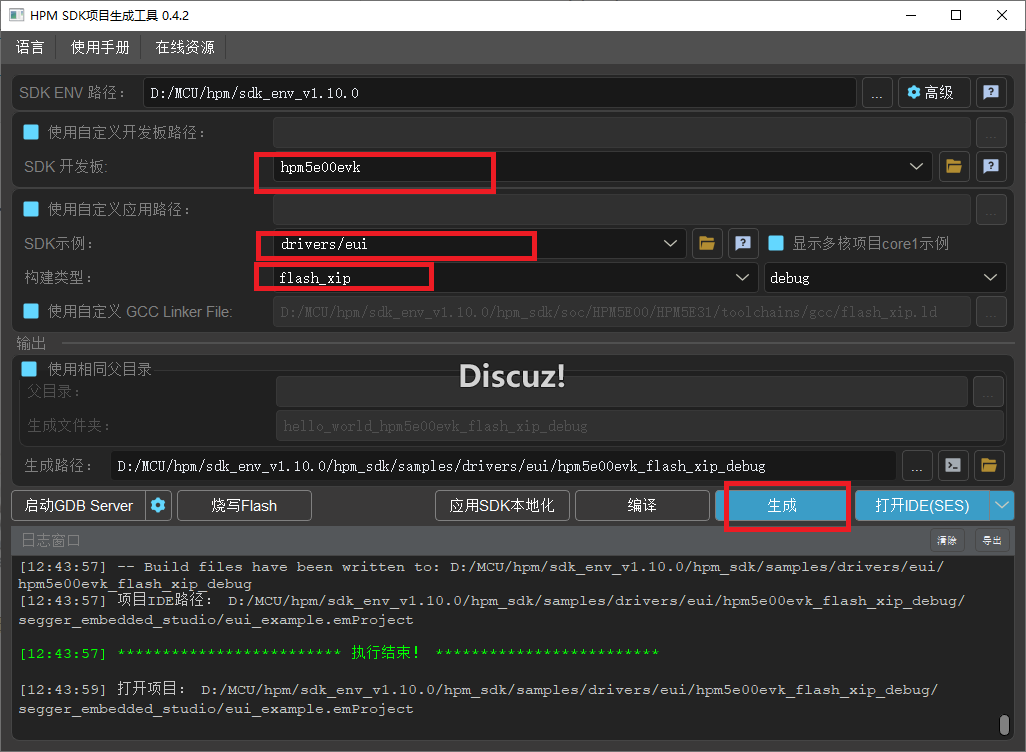
生成后,可以用SEGGER Embedded Studio 8.24打开工程,进行修改
在main函数中,注释掉原有的函数,调用一个自己的函数
//led_disp_config();
segment_disp();segment_disp内容如下:
voidsegment_disp(void)
{
eui_scan_disp_data_t disp_data;
disp_data.data_8x8[0]= s_disp_code_8_seg[(count/10000)%10];
disp_data.data_8x8[1]= s_disp_code_8_seg[(count/1000)%10];
disp_data.data_8x8[2]= s_disp_code_8_seg[(count/100)%10];
disp_data.data_8x8[3]= s_disp_code_8_seg[(count/10)%10];
disp_data.data_8x8[4]= s_disp_code_8_seg[count%10];
eui_set_scan_disp_data(BOARD_EUI,0,&disp_data);
count++;
}
就是每次调用函数,count加一,并在5个数码管上显示各位数字
在while(1)中增加
segment_disp();
board_delay_ms(500);
每500ms,增加一次count
eui引脚初始化
init_eui_pins(BOARD_EUI);
其中#define BOARD_EUI HPM_EUI1
voidinit_eui_pins(EUI_Type *ptr)
{
if(ptr == HPM_EUI1){
HPM_IOC->PAD[IOC_PAD_PB26].FUNC_CTL = IOC_PB26_FUNC_CTL_EUI1_CK;
HPM_IOC->PAD[IOC_PAD_PB27].FUNC_CTL = IOC_PB27_FUNC_CTL_EUI1_SH;
HPM_IOC->PAD[IOC_PAD_PB28].FUNC_CTL = IOC_PB28_FUNC_CTL_EUI1_DI;
HPM_IOC->PAD[IOC_PAD_PB29].FUNC_CTL = IOC_PB29_FUNC_CTL_EUI1_DO;
}else{
;
}
}
eui初始化函数
staticvoidinit_eui_config(void)
{
eui_ctrl_config_t ctrl_config;
eui_get_default_ctrl_config(BOARD_EUI,&ctrl_config);
ctrl_config.work_mode = eui_work_mode_8x8;
ctrl_config.clko_freq_khz =100;
ctrl_config.key_filter_ms =50;
ctrl_config.disp_data_invert =0xFF;
ctrl_config.scan_invert =0x00;
ctrl_config.dedicate_out_cfg = BOARD_EUI_DEDICATE_OUT_LINES;
ctrl_config.dedicate_in_cfg =0x0000;
eui_config_ctrl(BOARD_EUI, s_eui_clock_freq,&ctrl_config);
printf("clko_tm_us:%d, slot_tm_us:%d, hold_tm_us:%d, disp_tm_us:%d, filter_tm_us:%d\n\n",
eui_get_time_us(BOARD_EUI, s_eui_clock_freq, eui_clko_time),eui_get_time_us(BOARD_EUI, s_eui_clock_freq, eui_slot_time),
eui_get_time_us(BOARD_EUI, s_eui_clock_freq, eui_hold_time),eui_get_time_us(BOARD_EUI, s_eui_clock_freq, eui_disp_time),
eui_get_time_us(BOARD_EUI, s_eui_clock_freq, eui_filter_time));
eui_set_irq_enable(BOARD_EUI, eui_irq_area_mask);
intc_m_enable_irq_with_priority(BOARD_EUI_IRQ,1);
eui_set_enable(BOARD_EUI, true);
}
1.3 运行效果
二、16位ADC采样实验
HPM5E00支持高达16位的ADC采样。
SDK中提供了ADC采样示例位于:sdk_env_v1.10.0\hpm_sdk\samples\drivers\adc\adc16
本文对示例做适当修改,将采集数据转换为电压并通过LED数码管显示。
2.1 生成工程
2.2 软件部分
1、初始化oneshot模式
voidinit_oneshot_config(void)
{
adc16_channel_config_t ch_cfg;
/* get a default channel config */
adc16_get_channel_default_config(&ch_cfg);
/* initialize an ADC channel */
ch_cfg.ch = BOARD_APP_ADC16_CH_1;
ch_cfg.sample_cycle = APP_ADC16_CH_SAMPLE_CYCLE;
adc16_init_channel(BOARD_APP_ADC16_BASE,&ch_cfg);
adc16_set_nonblocking_read(BOARD_APP_ADC16_BASE);
#ifdefined(ADC_SOC_BUSMODE_ENABLE_CTRL_SUPPORT)&& ADC_SOC_BUSMODE_ENABLE_CTRL_SUPPORT
/* enable oneshot mode */
adc16_enable_oneshot_mode(BOARD_APP_ADC16_BASE);
#endif
}
2、EUI设备初始化及数码管显示电压数值函数
#include"board.h"
#include"hpm_eui_drv.h"
#include"hpm_interrupt.h"
#include"hpm_clock_drv.h"
#include"common.h"
staticconstuint8_t s_disp_code_8_seg[]= BOARD_EUI_SEG_ENCODE_DATA;
staticuint32_t s_eui_clock_freq;
voidinit_eui_config(void)
{
eui_ctrl_config_t ctrl_config;
clock_add_to_group(BOARD_EUI_CLOCK_NAME,0);
s_eui_clock_freq =clock_get_frequency(BOARD_EUI_CLOCK_NAME);
eui_get_default_ctrl_config(BOARD_EUI,&ctrl_config);
ctrl_config.work_mode = eui_work_mode_8x8;
ctrl_config.clko_freq_khz =100;
ctrl_config.key_filter_ms =50;
ctrl_config.disp_data_invert =0xFF;
ctrl_config.scan_invert =0x00;
ctrl_config.dedicate_out_cfg = BOARD_EUI_DEDICATE_OUT_LINES;
ctrl_config.dedicate_in_cfg =0x0000;
eui_config_ctrl(BOARD_EUI, s_eui_clock_freq,&ctrl_config);
/*
printf("clko_tm_us:%d, slot_tm_us:%d, hold_tm_us:%d, disp_tm_us:%d, filter_tm_us:%d\n\n",
eui_get_time_us(BOARD_EUI, s_eui_clock_freq, eui_clko_time), eui_get_time_us(BOARD_EUI, s_eui_clock_freq, eui_slot_time),
eui_get_time_us(BOARD_EUI, s_eui_clock_freq, eui_hold_time), eui_get_time_us(BOARD_EUI, s_eui_clock_freq, eui_disp_time),
eui_get_time_us(BOARD_EUI, s_eui_clock_freq, eui_filter_time));
eui_set_irq_enable(BOARD_EUI, eui_irq_area_mask);
intc_m_enable_irq_with_priority(BOARD_EUI_IRQ, 1);
*/
eui_set_enable(BOARD_EUI, true);
}
voidadc_led_disp(uint16_t val)
{
float f_val=val*3.3/65535;
printf("f_val:%f\r\n",f_val);
eui_scan_disp_data_t disp_data;
disp_data.data_8x8[0]= s_disp_code_8_seg[((uint16_t)f_val)%10]|BOARD_EUI_SEG_DP_BIT_MASK;
disp_data.data_8x8[1]= s_disp_code_8_seg[((uint16_t)(f_val*10))%10];
disp_data.data_8x8[2]= s_disp_code_8_seg[((uint16_t)(f_val*100))%10];
disp_data.data_8x8[3]= s_disp_code_8_seg[((uint16_t)(f_val*10000))%10];
disp_data.data_8x8[4]= s_disp_code_8_seg[((uint16_t)(f_val*100000))%10];
eui_set_scan_disp_data(BOARD_EUI,0,&disp_data);
}
3、oneshot采集处理,增加了调用adc_led_disp函数部分
voidoneshot_handler(void)
{
uint16_t result;
if(adc16_get_oneshot_result(BOARD_APP_ADC16_BASE, BOARD_APP_ADC16_CH_1,&result)== status_success){
if(adc16_is_nonblocking_mode(BOARD_APP_ADC16_BASE)){
adc16_get_oneshot_result(BOARD_APP_ADC16_BASE, BOARD_APP_ADC16_CH_1,&result);
}
printf("Oneshot Mode - %s [channel %02d] - Result: 0x%04x\n", BOARD_APP_ADC16_NAME, BOARD_APP_ADC16_CH_1, result);
adc_led_disp(result);
}
board_delay_ms(500);
}
4、EUI初始化
init_eui_pins(BOARD_EUI);
init_eui_config();
5、采集通道修改
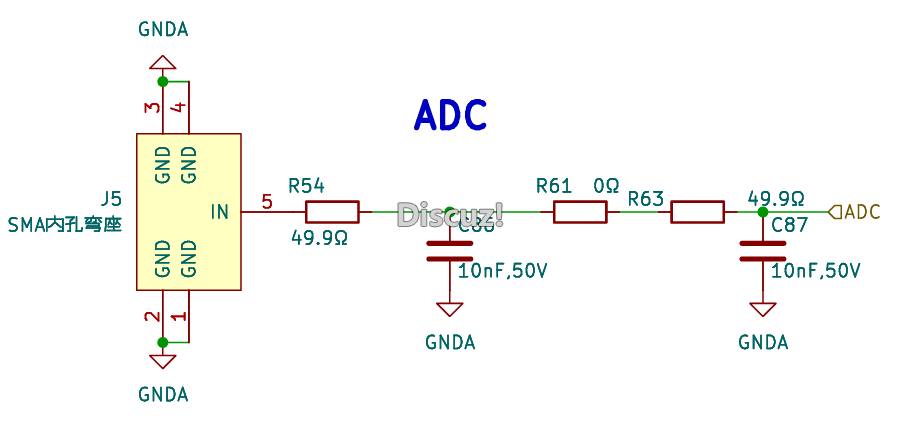
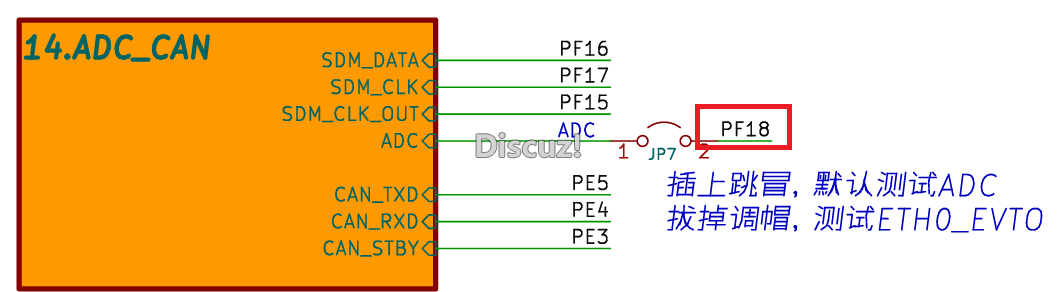
从原理图上可以看出ADC对应管脚PF18(ADC_IN11)
所以需要将BOARD_APP_ADC16_CH_1修改为11U
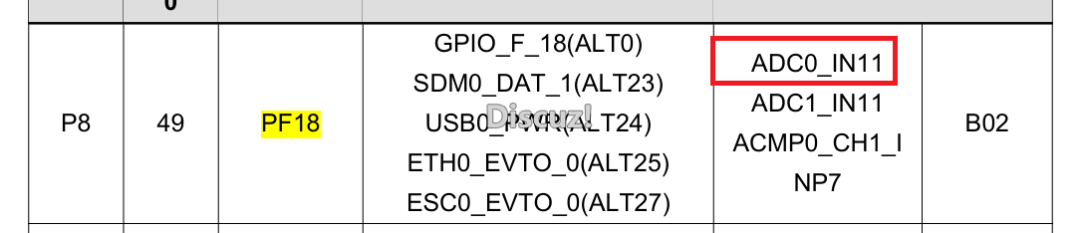
修改
#define BOARD_APP_ADC16_CH_1 (11U)
2.3 运行效果
串口输出

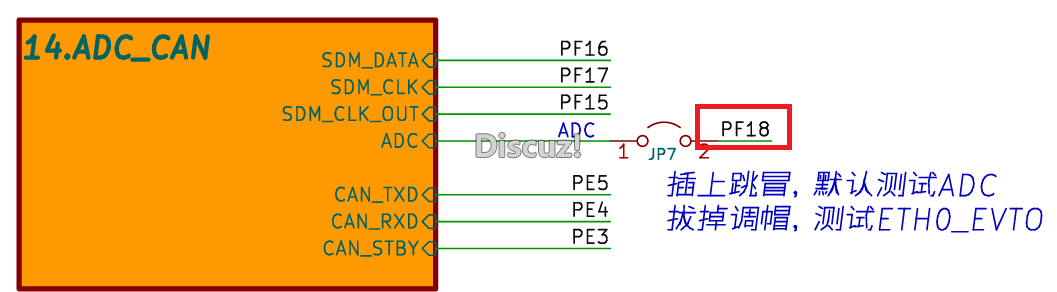
在跳冒断开的情况下,手触碰jp7,可以改变PF18输入电压,可以看到数码管显示电压随之改变。

三、SDM对Σ-Δ调制器输出数据采样
3.1 引言
SDM(Sigma-Delta Modulator)是Σ∆信号接收单元(Σ∆Modulator)。
Σ-Δ电流采样优点是容易实现模拟隔离采样:主回路的开关噪声对控制电路干扰大,会影响系统稳定性和控制精度,隔离Σ-Δ采样可以实现控制与主回路隔离。隔离Σ-Δ转换器是采用脉冲输出方式传输信号,通过数字隔离芯片的原理实现隔离,较模拟隔离成本低而且失真小。
HPM5E00提供SDM模块具有以下特点:
信号输入接口:
- 4组独立的CLK和DAT信号输入
- 每组CLK/DAT可独立配置采样模式
- 支持多种采样模式:
- Mode 0: MCLK上升沿采样
- Mode 1: MCLK上升沿和下降沿采样
- Mode 2: Manchester编码模式
- Mode 3: MCLK下降沿采样
- Mode 4: 每2个MCLK上升沿采样
- Mode 5: 每2个MCLK下降沿采样
- 数据滤波器(PCM_CIC):
- 支持4种滤波器类型:
- Sinc1 (1阶)
- Sinc2 (2阶)
- Sinc3 (3阶)
- SincFast (2阶快速)
- 可配置过采样率(1-256)
- 内置16深度32bit宽度FIFO
- 支持同步采样
- 支持掩码控制(指定版本)
- 可选时间戳输出功能(指定版本)
- 幅值检测器(AMP_CIC):
- 同样支持4种滤波器类型
- 独立的幅值监测通道
- 支持高/低门限检测
- 支持过零检测
- 可配置过采样率(1-32)
- 实时幅值输出
- 中断支持:
- FIFO阈值中断
- 数据溢出中断
- 数据饱和中断
- 幅值超限中断
- 同步功能:
- 支持TRGMUX触发输入
- 支持TRGMUX触发输出
3.2 数据寄存器
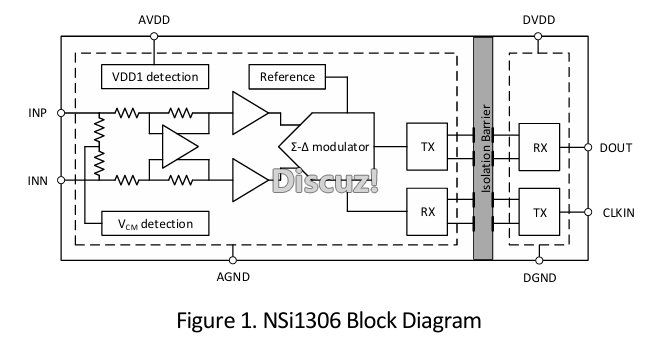
开发板上已经集成了NSI1306。NSI1306是一款高性能Σ-Δ调制器,基于NOVOSENSE电容隔离技术,其输出与输入分离。该器件的线性差分输入信号范围为±50mV(满量程±64mV)或±250mV范围(满量程±320mV)。差分输入非常适合需要隔离的高压应用中基于分流电阻的电流检测。模拟输入经过放大,并由二阶Σ-Δ调制器连续采样,然后转换为高速,单比特数据流。输出数据与外部时钟同步,时钟上升沿有效,频率范围为5MHz至21MHz。通过使用适当的数字滤波器(例如sinc3滤波器)来抽取比特流,该器件可以在78.125KPS的条件下以20MHz的主时钟实现16位分辨率和86dB/82.5dB信噪比(SNR)。故障安全功能包括输入共模过压检测和VDD1缺失检测,简化了系统设计和诊断。
NSI1306管脚图
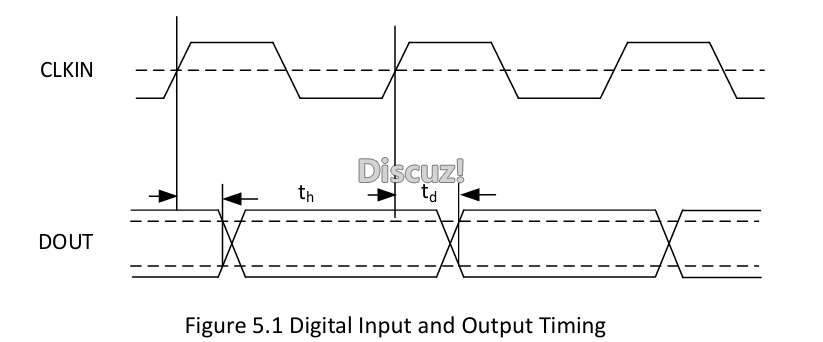
在CLKIN上升沿时通过DOUT采集数据
开发板原理图SDM连接图
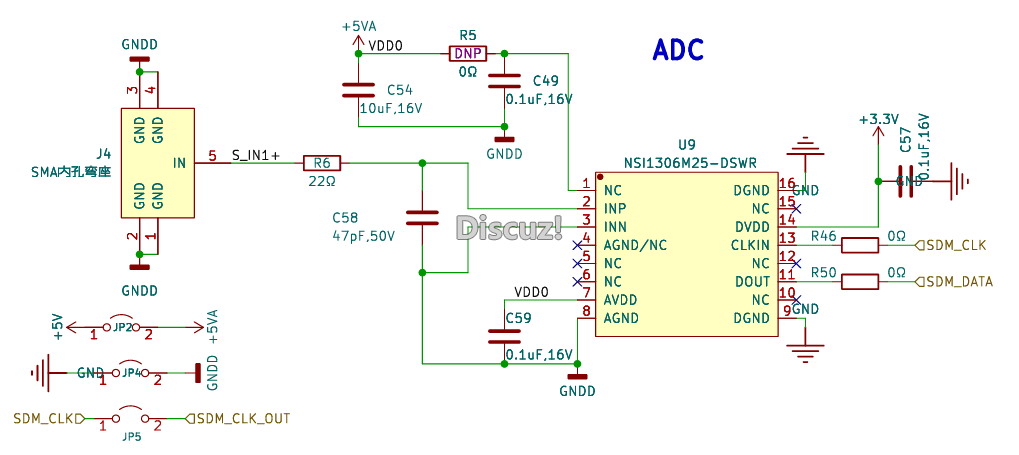
SDM使用了PF16、PF17管脚
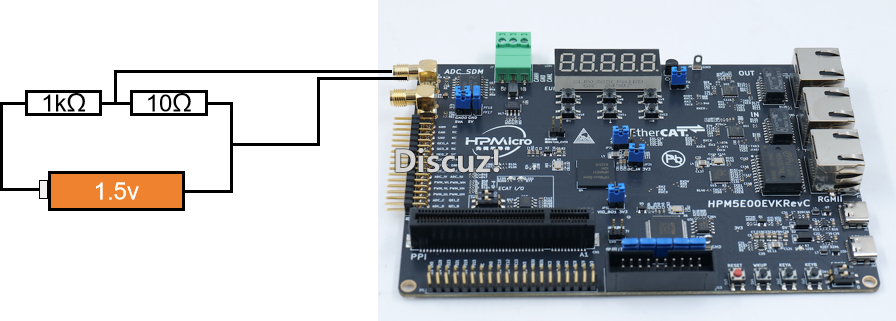
为了进行实验,外部接入如下分压电路,用于测量电池分压后的结果
3.3 软件部分
SDK示例中提供了四种工作模式演示:1. 轮询模式采样;2. 幅值检测模式;3. 中断模式采样;4. 同步信号采样模式
下面主要解读轮询模式采样模式。
(1) SDM 模块初始化
sdm_get_default_module_control(TEST_SDM,&control);
sdm_init_module(TEST_SDM,&control);
初始化 SDM 模块,配置时钟同步、数据同步。
(2) 通道配置
ch_config.sampling_mode = sdm_sampling_rising_clk_edge;
ch_config.enable_err_interrupt = false;
ch_config.enable_data_ready_interrupt = false;
sdm_config_channel_common_setting(TEST_SDM, TEST_SDM_CHANNEL,&ch_config);
采样模式:在时钟上升沿采样(与 NSI1306 的 Σ-Δ 输出同步)。
中断配置:禁用错误中断和数据就绪中断(使用轮询模式)。
(3) 数字滤波器配置
filter_config.filter_type = sdm_filter_sinc3;
filter_config.oversampling_rate =256;
filter_config.ignore_invalid_samples =2;
sdm_config_channel_filter(TEST_SDM, TEST_SDM_CHANNEL,&filter_config);
滤波器类型:Sinc³ 滤波器(适合 Σ-Δ 调制器,抑制高频噪声)。
过采样率 (OSR):256(提高分辨率,但降低带宽)。
无效样本忽略:跳过前 2 个样本(避免初始不稳定数据)。
(4) 数据采集与转换
do{
stat =sdm_receive_filter_data(TEST_SDM, TEST_SDM_CHANNEL, true,(int8_t*)filter_result, TEST_DATA_COUNT,4U);
}while(stat != status_success);
double voltage =sdm_data_value_to_voltage(&filter_config, filter_result[i]);
轮询数据:从 FIFO 读取 32 位滤波后的数据(filter_result 为缓冲区)。
电压转换:将原始数据转换为实际电压值。
3.4运行效果
串口输出采集结果:
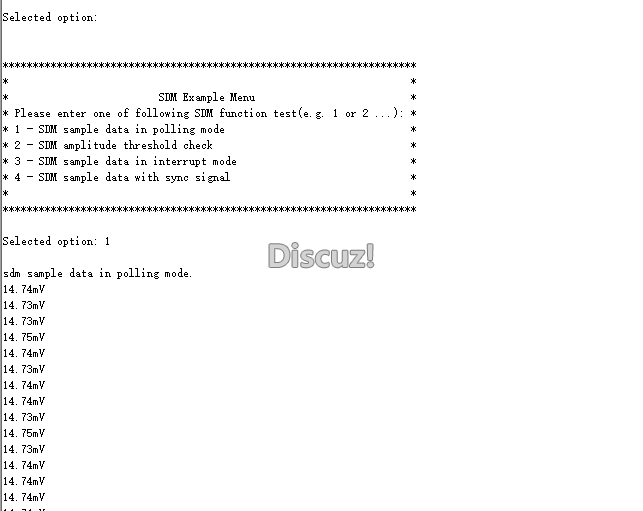
采集结果约为14.74mV
根据分压可以算出电池电压:1010*14.74/10=1488.74mV≈1.49V
四、外置SRAM模拟为U盘
SDK中有PPI接口驱动外置SRAM和TinyUSB模拟2个MSC大容量设备的例子。将2者结合可以将外置SRAM(256KB容量)虚拟为U盘。
原示例位于:
sdk_env_v1.10.0\hpm_sdk\samples\tinyusb\device\msc_dual_lun
4.1 软件部分
1、main函数增加
clock_add_to_group(clock_ppi0,0);
init_ppi_pins();
init_sram_config();
init_pmp_for_ppi();
init_disk(0xF8000000);
init_ppi_pins为板级函数,初始化PPI引脚以驱动外置SRAM
init_sram_config、init_pmp_for_ppi函数均可在
sdk_env_v1.10.0\hpm_sdk\samples\drivers\ppi\async_sram示例中找到
init_disk为将msc_disk1指向外置SRAM区域,用来虚拟U盘空间,这个函数需要在外置SRAM就位后调用。
msc_disk1为指向数组的指针。
uint8_t (*msc_disk1)[DISK_BLOCK_SIZE];
init_disk函数,diskinfo中有3个BLOCK(512字节*3)为FAT文件结构,需要拷贝到msc_disk1中,msc_disk1的其他部分需清零
voidinit_disk(uint32_t start){
// Cast the start address to our disk pointer type
msc_disk1 =(uint8_t(*)[DISK_BLOCK_SIZE])start;
// Copy the disk info to the disk memory
memcpy(msc_disk1, diskinfo,3* DISK_BLOCK_SIZE);
memset(msc_disk1 +3,0,(512-3)* DISK_BLOCK_SIZE);
}
2、TinyUSB模拟MSC设备部分(msc_disk_dual.c)
diskinfo为FAT文件系统定义,对原示例进行了修改。
diskinfo位于flash区域,非内存,需要在外置SRAM就位后,copy到msc_disk1中
block2、block3相同为FAT12表
staticconstuint8_t diskinfo[4][DISK_BLOCK_SIZE]=
{
{
0xEB,0x3C,0x90,0x4D,0x53,0x44,0x4F,0x53,0x35,0x2E,0x30,0x00,0x02,0x01,0x01,0x00,
0x02,0x10,0x00,0x00,0x02,0xF8,0x02,0x00,0x01,0x00,0x01,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x80,0x00,0x29,0x78,0x56,0x00,0x00,'T','i','n','y','U',
'S','B',' ','1',' ',' ',0x46,0x41,0x54,0x31,0x32,0x20,0x20,0x20,0x00,0x00,
/* Zero up to 2 last bytes of FAT magic code */
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00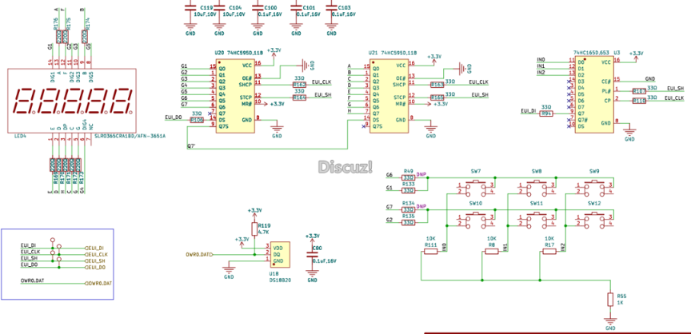



全部评论