Allegro A31315是一款多轴霍尔效应传感器,凭借先进的集成信号处理能力简化系统设计人员的诸多设计挑战,这款先进线性传感器还通过两条先进线性霍尔传感通道无缝集成至信号处理链路,可提供:
独立的传感器增益值和偏移量调整
两点编程
四种输出线性化模式
带翻转控制的复杂信号调理
16位输出/结果寄存器
这些功能可以根据客户的应用需求进行优化配置,为众多应用及其挑战提供广泛的解决方案。
许多系统设计人员面临的一项挑战是如何使传感器适应其应用的磁性要求。当许多其他传感器受到限制并且仅提供“最接近适配”时,A31315的信号处理模块使设计人员能够调整传感器以适配系统的机械性及磁性约束。
本文将使用现成的磁靶SuperMagnetMan(料号C0255) 来简要演示A31315的行为特征/性能和优势。该磁靶是一个1/4英寸的N40钕铁硼材料正方体,但许多其它尺寸和材料的磁靶也是可接受的,只要达到±300G峰值的最小磁场范围。该磁靶将用于演示其在侧向滑移运动应用的能力,正如制动或加速踏板中可能用到的那样。
本应用指南作以下假设:
读者熟悉A31315的编程软件环境
读者熟悉两点编程和线性化的概念
用户可以通过编程软件和适当的编程硬件(通常是ASEK20)与A31315进行通信
初步工作
在应对特定应用的挑战之前,最好先了解将要面临的传感挑战的性质。本指南末尾提供的图15应作为参考,以了解传感应用中通常存在的问题。在评估图15时,请记住输入波形的特定属性,以便知道要查看什么。
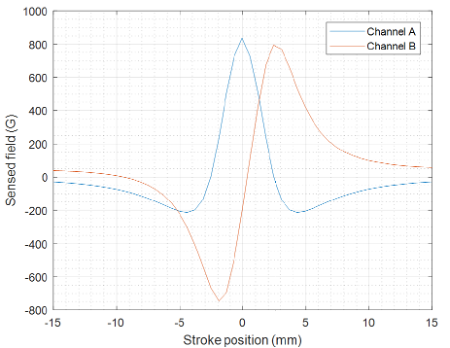
快速调节传感器以适应系统的第一步是获取霍尔传感器输出的基线读数。这一步是最重要的,因为输入特性对输出信号质量的有效性影响最大。
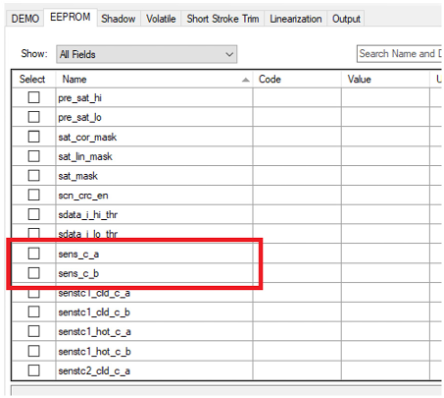
将图1所示的测量信号与本文档末尾的图15进行比较时,它与两个输入通道不匹配和/或行程过长的输入情况相符。对于A31315,用户可以选择通过以下寄存器调整系统增益参数:
Sens_c_a – 通道A的粗调灵敏度调整
Sens_c_b – 通道B的粗调灵敏度调整
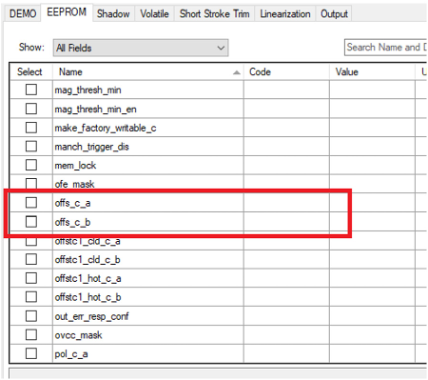
A31315还提供有助于使被测信号居中的偏移量寄存器:
Offs_c_a – 通道A的偏移量调整
Offs_c_b – 通道B的偏移量调整
调整这些寄存器时,目的是使输入信号最接近正弦和余弦信号。匹配度越高,输出响应就越 “自然线性”。对于图1所示的行程,本例选择的行程范围为-3mm到+3mm。
在这种情况下,通道B将通过偏移校正受益:
CH_B: +50G
调整增益和偏移量的目的,是将感应信号校正为尽可能接近正弦和余弦形状。
信号中的非理想性(图5)导致报告位置非线性。输出减小,甚至未达到一半(计数为32768),这可以通过行程中缺乏完整的360°正弦/余弦感应磁场来解释。这种范围上的限制可以通过两点编程进行校正。非线性可以通过多功能的线性化引擎进一步解决,最多可进行33点校正。
使用两点编程(有时称为短行程),初始数据点被移动到计数为0点附近,而最终数据点经增益补偿被移到大约计数值65535(16位)处。有两种方法可以在两点编程块中对系数和偏移量编程:
通过寄存器操作:
- Angle_gain
- Pre_gain_offset
通过 Samples 编程软件半自动操作
寄存器操作
通过寄存器操作进行调整非常简单,并且可以轻松手算。该区块的相关寄存器可在EEPROM选项卡中的“短行程”下拉菜单中找到。
为简单起见,重点寄存器是:
pre_gain_offset:为起始值添加一个偏移量,通常是一个大小可调的值,将起始点推到零。值范围从0到32767。
angle_gain:对已上报出的输出值应用一个增益值。“角度”是旋转应用的典型术语,但也适用于线性应用。值范围从0到65535,增益为1与计数为1024等效。
对于线性应用,术语必须保持一致。软件将值表示为影响性的角度;然而,该术语仅用于给出输出寄存器从0到65535范围的参考。对于pre_gain_offset,此寄存器将偏移量添加到从A31315内部CORDIC引擎给出的输出中;如果输出结果超出16位寄存器宽度,则净效果是输出翻转。这对于将起始点归零特别有用。
图6恰好从零开始,但可以假设起始点位于计数为2458处,将初始点设置为零只需添加一个偏移量以强制结果等于65536:
偏移量 = 65536 – 起始点计数
偏移量 = 65536 – 2458
偏移量 = 63078
在图8中,报出的最大位置是计数为32770的输出位置。角度增益可以轻松校正此问题:
angle_gain = 期望输出 / 实际输出
angle_gain = 65535 / 32770
angle_gain = 1.999 (2)
使用短行程工具
在Samples软件中,可以跳过手工计算,并使用短行程选项卡即可快速执行此步骤。
在这里,系统必须先被设置为最小位置,用户只需按下“设置位置1”。软件将问询A31315并执行初步计算。完成后,再将系统移动到最终位置并单击“设置位置2”。通过单击“计算并编程元件”来编程新值。
输出误差
对于线性侧向滑移应用,输出误差通常表示为百分比或绝对测量单位。在本指南图10所示的示例中,非线性行为特征仍然存在。
为了校正此误差,必须应用线性化。为了获得最高性能,必须采集更多数据点(33个)。在这种情况下,系统从起始位置到最终位置,以32个等距步长(从“零”开始总共33个位置点)进行步进。每个位置点都在A31315 Samples编程软件中采集,并显示在图11中。
一旦加载了值,单击“写入元件”将计算校正系数并对目标元件进行编程。
在数据已采集且预期位置已记录的情况下,线性位置可以转换为软件的“角度”:
角度 = 360° × (计数_值 / 65536)
在这种情况下,软件将导入一个CSV文件,其中第一列是预期位置,第二列是记录位置。
图12展示了对原始曲线执行的线性化后处理。为了提供有意义的细节,将真实信号与预期理想信号进行比较。线性误差(通常以百分比表示)显示在图13中。线性化后,最终误差从4.2%降低到0.28%。
额外处理
一旦关注的信号经过处理和线性化,在某些情况下必须应用限制以满足某些系统规格或余量。A31315为用户提供了一套工具,用于调整线性化后输出信号的行为特征。
钳位 (Clamping)
在某些应用中,要求限制传感器输出的信号范围。假设作为系统故障安全设计的一部分,定义了10%的最小和最大余量。此限制可以通过应用以下寄存器进行设置:
Lower_clamp:建立信号块的最小输出值。(可接受的值从0到65535)
Upper_clamp:建立信号块的最大输出值。(可接受的值从0到65535)
65535的10%大约是6554,这将设置给lower_clamp寄存器。最大信号的90%将是58982,这将设置给upper_clamp寄存器。
饱和 (Saturation)
钳位提供对其所见数据的约束功能。然而,如果从CORDIC模块进入两点编程模块的数据导致寄存器溢出(计数数据将超过65535),就像角度增益增加的情况(参见图6),输出字可能会翻转归零并重新开始。这将表现为钳位高值突然切换到钳位低值,然后可能返回到上升的输出。
而饱和是这样一个模块,它可以通过忽略表明传感器正在超出当前感应限制的数据来抑制这种行为特征。此功能由以下寄存器管理和控制:
Post_gain_sat:设置为1以启用饱和。
Post_gain_sat_val:输入信号被忽略的交界点,可接受的计数输入为0-255。
post_gain_sat_val的计算有多个步骤,需要一些考虑。详细过程在A31315数据手册中描述。图14显示了这些效应的一组集合。
考量与结论
要实现高效设计,有必要了解系统预期输出信号随输入变化的表现;条件允许时,应选择契合传感器正常工作范围(±300G到±1000G)的磁性元件,以获得更高信噪比,同时需明确行程的行为特征——直接线性路径与 “线性” 弧形路径各有独特挑战,而该多轴霍尔效应传感器的功能可有效应对这些挑战。
处理系统设计的简要步骤:
获取磁场在行程上向传感器的映射。
查阅表(本文档末尾)以快速参考元件中可能需要的功能。
确定机械操作范围。
应用选定的信号处理模块。
遵循该程序可最大限度缩短系统开发时间,帮助设计人员更快获取可行的解决方案;而集成信号处理模块能便捷调节系统,在降低处理器与软件负荷的同时,提供更优结果。



全部评论