
一:简介
电子秤是将检测与转换技术、计算机技术、信息处理、数字技术等技术综合一体的现代新型称重仪器。它与我们日常生活紧密结合息息相关。
电子称主要以单片机作为中心控制单元,通过称重传感器进行模数转换单元,在配以键盘、显示电路及强大软件来组成。电子称不但计量准确、快速方便,更重要的自动称重、数字显示,对人们生活的影响越来越大,广受欢迎。
二:硬件设计
2.1系统总体设计方案比较与论证
在设计系统时,针对各个模块实现的功能来设计电子秤的方案有以下几种:
数码管显示:
图1 数码管显示方案

此方案利用数码管显示物体重量,简单可行,可以采用内部带有模数转换功能的单片机。由此设计出的电子秤系统,硬件部分简单,接口电路易于实现,并且在编程时大大减少程序量,在电路结构上只有简单的输出输入关系。缺点是:硬件部分简单,虽然可以实现电子称基本的称重功能,但是不能实现外部数据的输入,无法根据实际情况灵活地设定各种控制参数。由于数码管只能实现简单的数字和英文字符的显示,不能显示汉字以及其他的复杂字符,不能达到显示部分特殊的要求。
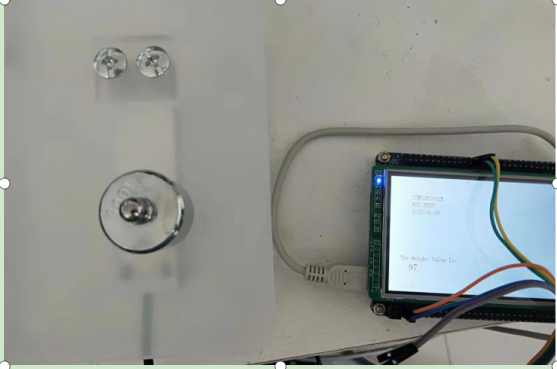
但是我手头上没有现成的LED模块,就拿TFT的屏幕做的显示,原理是一样的。
2.2 AD转换芯片选择
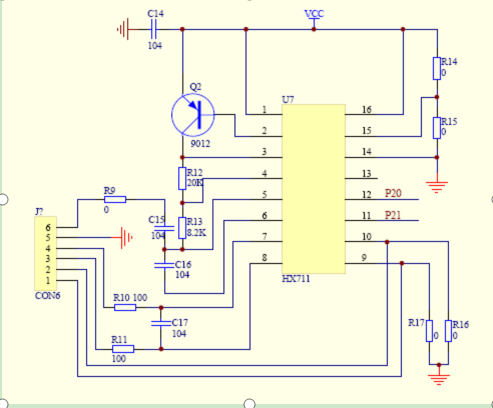
HX711是一款专为高精度电子秤而设计的24位A/D转换器芯片。与同类型其它芯片相比,该芯片集成了包括稳压电源、片内时钟振荡器等其它同类型芯片所需要的外围电路,具有集成度高、响应速度快、抗干扰性强等优点。降低了电子秤的整机成本,提高了整机的性能和可靠性。该芯片与后端MCU 芯片的接口和编程非常简单,所有控制信号由管脚驱动,无需对芯片内部的寄存器编程。输入选择开关可任意选取通道A 或通道B,与其内部的低噪声可编程放大器相连。通道A 的可编程增益为128 或64,对应的满额度差分输入信号幅值分别为±20mV或±40mV。通道B 则为固定的64 增益,用于系统参数检测。芯片内提供的稳压电源可以直接向外部传感器和芯片内的A/D 转换器提供电源,系统板上无需另外的模拟电源。芯片内的时钟振荡器不需要任何外接器件。上电自动复位功能简化了开机的初始化过程。芯片管脚图如图所示。
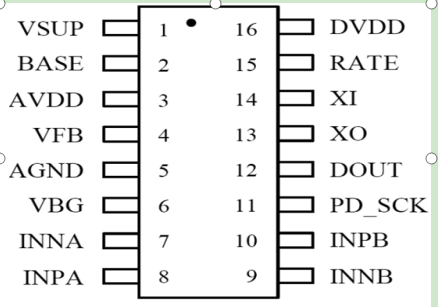
HX711管脚定义
2.3
2.3.1传感器选择
压电传感器是一种典型的有源传感器,又称自发电式传感器。其工作原理是基于某些材料受力后在其相应的特定表面产生电荷的压电效应。
压电传感器体积小、重量轻、结构简单、工作可靠,适用于动态力学量的测量,不适合测频率太低的被测量,更不能测静态量。目前多用于加速度和动态力或压力的测量。压电器件的弱点:高内阻、小功率。功率小,输出的能量微弱,电缆的分布电容及噪声干扰影响输出特性,这对外接电路要求很高。
电阻应变式传感器是一种利用电阻应变效应,将各种力学量转换为电信号的结构型传感器。电阻应变片式电阻应变式传感器的核心元件,其工作原理是基于材料的电阻应变效应,电阻应变片即可单独作为传感器使用,又能作为敏感元件结合弹性元件构成力学量传感器。
导体的电阻随着机械变形而发生变化的现象叫做电阻应变效应。电阻应变片把机械应变信号转换为△R/R后,由于应变量及相应电阻变化一般都很微小,难以直接精确测量,且不便处理。因此,要采用转换电路把应变片的△R/R变化转换成电压或电流变化。其转换电路常用测量电桥。
直流电桥的特点是信号不会受各元件和导线的分布电感及电容的影响,抗干扰能力强,但因机械应变的输出信号小,要求用高增益和高稳定性的放大器放大。
下图为一直流供电的平衡电阻电桥,接直流电源E:
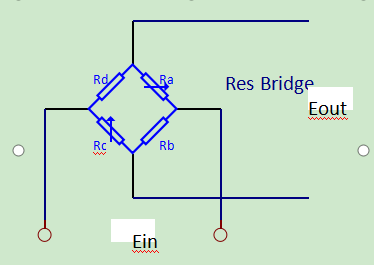
传感器内部连接图
当电桥输出端接无穷大负载电阻时,可视输出端为开路,此时直流电桥称为电压桥,即只有电压输出。
当忽略电源的内阻时,由分压原理有:
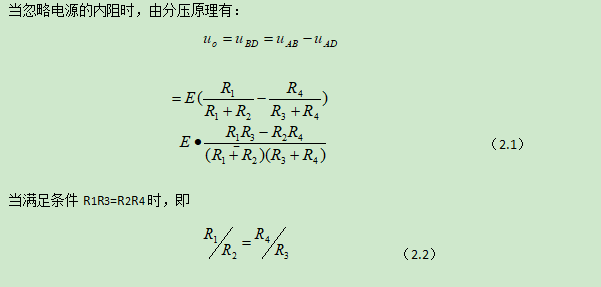
= (2.1)
当满足条件R1R3=R2R4时,即
(2.2)
=0,即电桥平衡。式(2.2)称平衡条件。
应变片测量电桥在测量前使电桥平衡,从而使测量时电桥输出电压只与应变片感受的应变所引起的电阻变化有关。
若差动工作,即R1=R-△R,R2=R+△R,R3=R-△R,R4=R+△R,按式(2.1),则电桥输出为
STM32核心采集软件代码部分:
u32 HX711_Buffer;
u32 Weight_Maopi;
s32 Weight_Shiwu;
u8 Flag_Error = 0;
//校准参数
//因为不同的传感器特性曲线不是很一致,因此,每一个传感器需要矫正这里这个参数才能使测量值很准确。
//当发现测试出来的重量偏大时,增加该数值。
//如果测试出来的重量偏小时,减小改数值。
//该值可以为小数
#define GapValue 94.5
void Init_HX711pin(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PF端口时钟
//HX711_SCK
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; // 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB
//HX711_DOUT
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//输入上拉
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_0); //初始化设置为0
}
//****************************************************
//读取HX711
//****************************************************
u32 HX711_Read(void) //增益128
{
unsigned long count;
unsigned char i;
HX711_DOUT=1;
delay_us(1);
HX711_SCK=0;
count=0;
while(HX711_DOUT);
for(i=0;i<24;i++)
{
HX711_SCK=1;
count=count<<1;
delay_us(1);
HX711_SCK=0;
if(HX711_DOUT)
count++;
delay_us(1);
}
HX711_SCK=1;
count=count^0x800000;//第25个脉冲下降沿来时,转换数据
delay_us(1);
HX711_SCK=0;
return(count);
}
//****************************************************
//获取毛皮重量
//****************************************************
void Get_Maopi(void)
{
Weight_Maopi = HX711_Read();
}
//****************************************************
//称重
//****************************************************
void Get_Weight(void)
{
HX711_Buffer = HX711_Read();
if(HX711_Buffer > Weight_Maopi)
{
Weight_Shiwu = HX711_Buffer;
Weight_Shiwu = Weight_Shiwu - Weight_Maopi; //获取实物的AD采样数值。
Weight_Shiwu = (s32)((float)Weight_Shiwu/GapValue); //计算实物的实际重量
//因为不同的传感器特性曲线不一样,因此,每一个传感器需要矫正这里的GapValue这个除数。
//当发现测试出来的重量偏大时,增加该数值。
//如果测试出来的重量偏小时,减小改数值。
}
}
主函数:
Get_Weight();
LCD_ShowString(30,220,200,16,16,"The Weight Value Is: ");
LCD_ShowNum(30,240,Weight_Shiwu,4,24);
后记:虽然用I2C的通讯方式将数据读取并做了显示,但是长时间的通电测试数据会发生漂移的现象,查了查数据手册也没有找到原因。该项目作为毕业设计的参考是没有问题的,但是用到工业,产品上面需要慎重。
实物如下:



全部评论