
聪聪哥哥
【星允派 NEBULA PI】16:实现SG90舵机的驱动
一:舵机知识分享:
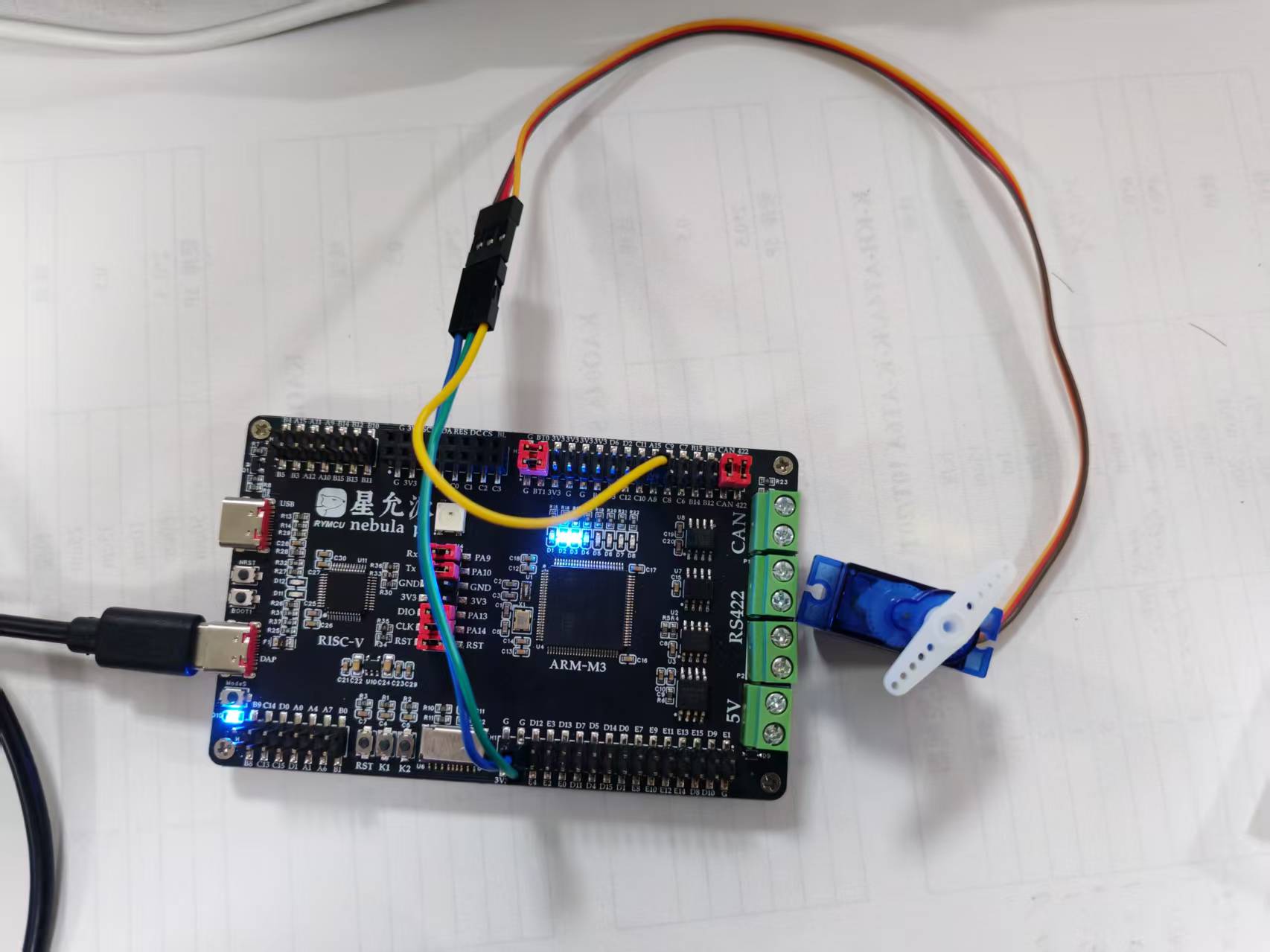
实物图片如下所示:

“舵机”这一名称源于它的主要功能:像船舶或飞机的舵一样,控制方向和位置。这个术语结合了两个关键概念:
1.舵(舵):舵是用于控制船舶或飞机方向的装置,通过调整舵的位置来改变航向。舵机在机器人和自动化系统中起到类似的作用,用于精确控制某个部件的位置或角度。
2.机(机械装置):舵机是一种机械装置,通过电动机和反馈系统控制舵盘的转动。它将电信号转换为机械运动,实现对角度的精确控制。
因此,舵机(ServoMotor)得名于其通过反馈控制机制来实现精确的位置调节功能,类似于舵在航行中的作用。
二:舵机的工作原理:
舵机通过周期为20ms的脉宽调制(PWM)信号进行控制,脉冲宽度从0.5ms到2.5ms,对应舵盘的角度从0到180°,变化是线性的。内部有一个基准电路产生周期20ms、宽度1.5ms的基准信号,通过比较器与外加信号比较,产生电机转动信号。控制电路板接收PWM信号,驱动电机转动,经过减速齿轮组传动到舵盘。舵机的输出轴与位置反馈电位计连接,舵盘转动带动电位计输出电压信号到控制电路板,电路板根据反馈信号调整电机方向和速度,确保舵盘达到并保持在目标位置。
三:舵机的分类:
模拟舵机需要持续发送目标位置的PWM信号来保持位置;一旦信号停止,舵机可能会失去位置。
数字舵只需机一次目标PWM信号,即可迅速且准确地达到并保持目标位置。SG90是模拟舵机,而SG90S是数字舵机。数字舵机在程序控制和运行性能上通常优于模拟舵机。
四:程序编写流程如下所示:
4.1 定时器初始化,配置为 PWM 模式
4.2 在任务回调中,添加对脉宽的控制函数:
4.3 代码如下:
定时器初始化:
void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 1439;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 999;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_PWM_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
HAL_TIM_MspPostInit(&htim1);
}void UpdataDutyData(int value)
{
TIM_OC_InitTypeDef sConfigOC = {0};
htim1.Instance = TIM1;
htim1.Init.Prescaler = 1439;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 999;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_OC_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 999 * value/100 ;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_OC_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);
}4.2 在1S任务中添加对定时器1的PA8引脚,输出脉宽为30%的频率:
void task_1000ms(void)
{
DutyData ++ ;
if(DutyData >=15 ) DutyData = 3 ;
if (OutPutflag == 0)
{
OutPutflag = 1 ;
UpdataDutyData(DutyData);
}
else
{
OutPutflag = 0 ;
HAL_TIM_PWM_Stop(&htim1,TIM_CHANNEL_1);
}
}五:实物测试视频如下:
测试图片如下所示:
源码地址如下:
https://gitee.com/congcong-brother/rymcus-evaluation-code-series.git
版块:
单片机/MCU论坛
2025/09/08 19:05



全部评论