
卢工爱分享
机器人关节模组拆解1:谐波减速器
之前我们简要介绍了机器人关节模组的构成(机器人关节模组一次讲透)。一个关节模组看起来像是一个整体,背后其实由电机、减速器、编码器、驱动器等多个部分共同组成。接下来,我们就按模块逐个拆开来看。今天先从其中一个最关键的机械部件讲起:谐波减速器。
为什么机器人关节里离不开谐波减速器

在机器人关节模组里,减速器决定了很多关键性能:输出扭矩够不够大,控制是否平稳,重复定位能不能做得好,整个关节能不能做得紧凑。对今天大量轻量化、高精度的机器人来说,谐波减速器就是最常见的方案之一。之所以它在机器人里这么常见,核心原因并不复杂。机器人关节通常希望同时满足几件事:体积小、重量轻、减速比高、回差小、输入输出同轴。传统齿轮方案里,这几个目标往往很难同时兼顾;但谐波减速器正好在这些指标上很有优势,所以特别适合放进关节模组这种空间紧、性能要求又高的地方。它的典型优点包括低背隙、紧凑轻量、高减速比、高扭矩能力,以及输入输出同轴。
谐波减速器到底由哪几部分组成
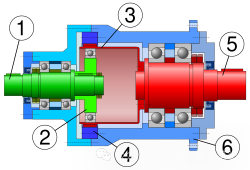
1. 输入轴 2. 波发生器 3. 柔轮 4. 刚轮 5. 输出轴 6. 外壳谐波减速器本质上是一种利用弹性变形来传递运动和实现减速的机构。它的结构并不算复杂,经典形式主要由三个核心部件组成:波发生器、柔轮和刚轮。波发生器通常是一个椭圆形的构件,外面套着轴承;柔轮是一个很薄壁、带外齿的柔性杯形零件;刚轮则是一个带内齿的刚性圆环。工作时,波发生器装进柔轮内部,把柔轮撑成椭圆形;这样一来,柔轮外齿就只会在椭圆长轴两端附近与刚轮内齿啮合。随着波发生器不断转动,这两个啮合区域也会绕中心连续“转圈”,从而把输入运动传递出去。
谐波减速器真正巧妙的地方,不仅在于“让柔轮变形”,而且在于柔轮和刚轮的齿数故意不一样。通常柔轮会比刚轮少两个齿。这样,当波发生器每转一圈,啮合区域虽然绕中心转了一整圈,但由于齿数差的存在,柔轮相对于刚轮只会反向前进很小的一点点。如果刚轮有202个齿,柔轮有200个齿,那么减速比就是(200-202)/200 = -0.01,也就是输出转速约为输入的1/100,方向相反。这也是为什么谐波减速器能在很小体积里做出很高减速比。在相近空间下,谐波减速器可以做到大约30:1到100:1,而行星齿轮很多时候典型只有10:1左右。对于机器人关节来说,这意味着电机可以保持较高转速、较小体积,而输出端仍然能得到更大的力矩。换句话说,谐波减速器起到的作用,不只是“降速”,更是在帮关节重新分配速度和扭矩这两种资源。
机器人为什么偏爱谐波减速器
那为什么机器人特别喜欢它?因为机器人关节不是普通传动件,而是一个高精度控制部件。控制系统最怕的几个问题,一个是回差太大,一个是结质量太大引起控制带宽下降。谐波减速器的低背隙和较好的重复定位能力,使它在位置控制场景里非常有吸引力,尤其适合机械臂、协作机器人、人形机器人这些需要较高重复精度的系统。不过,谐波减速器并不是“完美减速器”。它的一个典型问题,是弹性带来的扭转柔性滞后。因为柔轮本来就是靠弹性变形工作的,所以在低扭矩或动态变化过程中,输出端并不会像理想刚体那样立刻跟上输入端。这会让控制系统表现的更像带弹簧的传动链在高动态响应、力控或者快速往返工况下,会更加依赖建模和补偿。
谐波减速器重要在哪里
一个完整关节模组往往至少包括:电机、减速器、编码器、驱动器,以及有些场景下的抱闸。电机负责提供高速旋转,谐波减速器负责把它变成低速大扭矩输出,编码器负责感知位置,驱动器负责电流和运动控制。很多机器人关节之所以能做得又薄又紧凑,本质上就是因为谐波减速器把“高减速比、小体积、同轴输出”这几个看起来有点矛盾的目标,尽量统一了起来。所以,如果把机器人关节模组拆开看,谐波减速器是整个传动链路的核心,它很大程度上决定了“电机+减速器”的组合可以真正用于机器人。它不是一个简单的配件,而是关节性能的核心放大器。今天很多机器人能把结构做得更轻、更紧凑、更像一个完整模组,谐波减速器就是背后最关键的机械基础件之一。
文章来源于公众号-机器人技术笔记,仅用于学习分享,如有侵权请私聊删除
版块:
机器人开源工坊
2026/05/29 16:07



全部评论