
卢工爱分享
机器人关节模块拆解,100W的关节电机集成EtherCAT

今天来拆解一个来自零差云控的eRob70型机器人关机电机模块,主要看看上面的无刷电机驱动电路。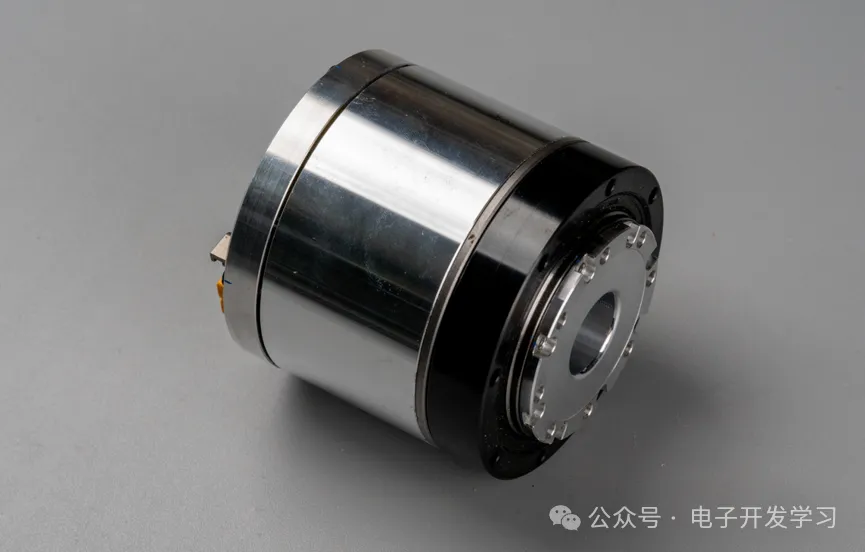
先简单说一下,这个关节支持EtherCAT、支持CANOpen、Modbus通信,开放位置环、速度环、电流环数据以及PID实时调节,电机功率可以做到100W,整个电机的尺寸只有直径70mm,长度67mm,重量为0.93kg。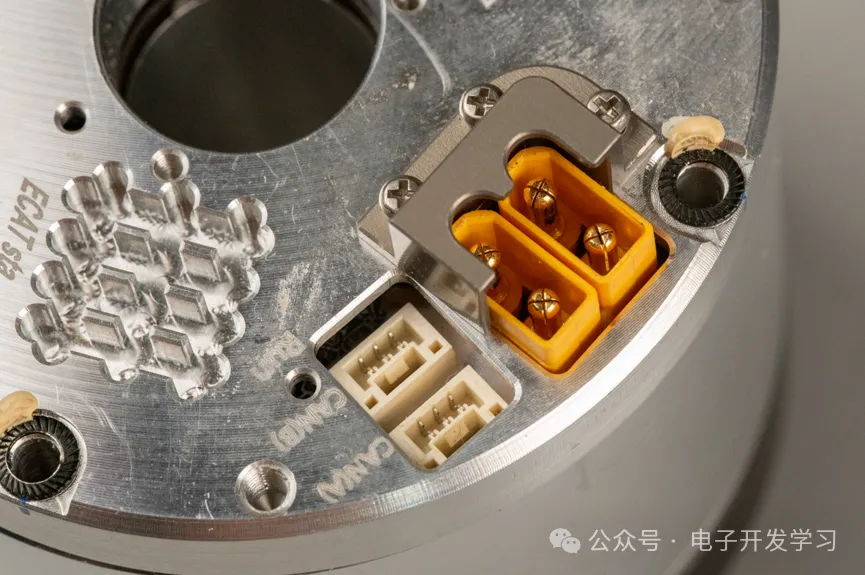
端盖上放置了所有的供电、通信接口,两个XT30供电口,旁边还带了一个锁扣。供电线插上之后,使用螺丝把这个锁扣固定住,就可以锁死线材。

外壳上采用CNC铣了几个散热齿片出来。
这是它的通信接口,其中右边两个GH1.25X4的连接器是ECAT In和ECAT Out。
这个端盖内部,也铣除了相当复杂的内部结构,用来和PCB进行装配。
这是电路板全貌,典型的无刷电机驱动电路的形态。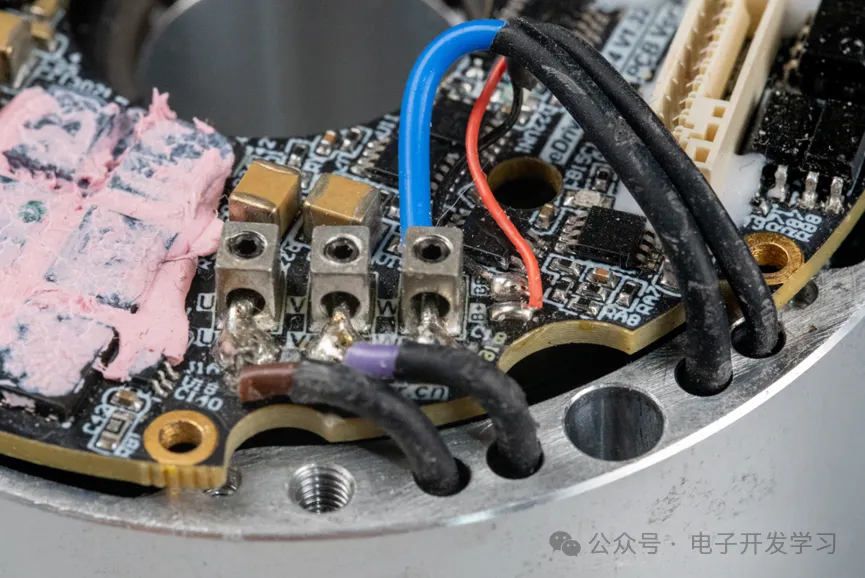
从电路板到电机的UVW相线,采用了很微小的螺丝固定端子。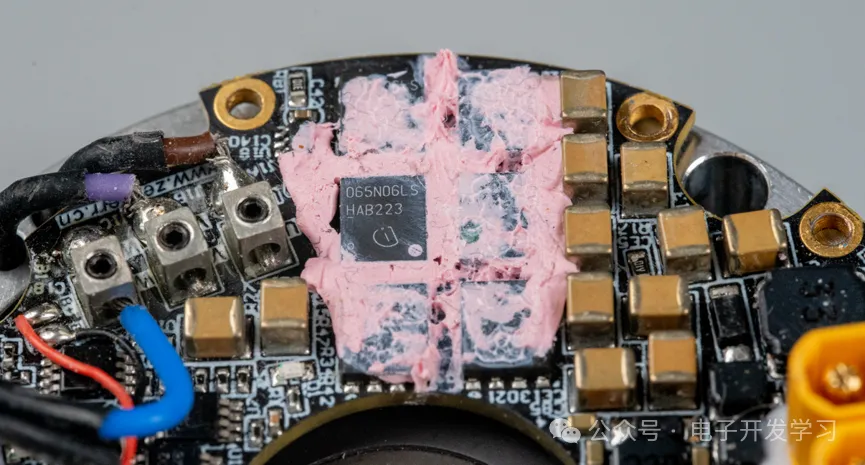
电机驱动方面总共用了6个MOS组成三相全桥,MOS管采用的是英飞凌的BSC065N06LS5,这个管子的耐压是60V,导通阻抗6.5mΩ,Qg为10nC。
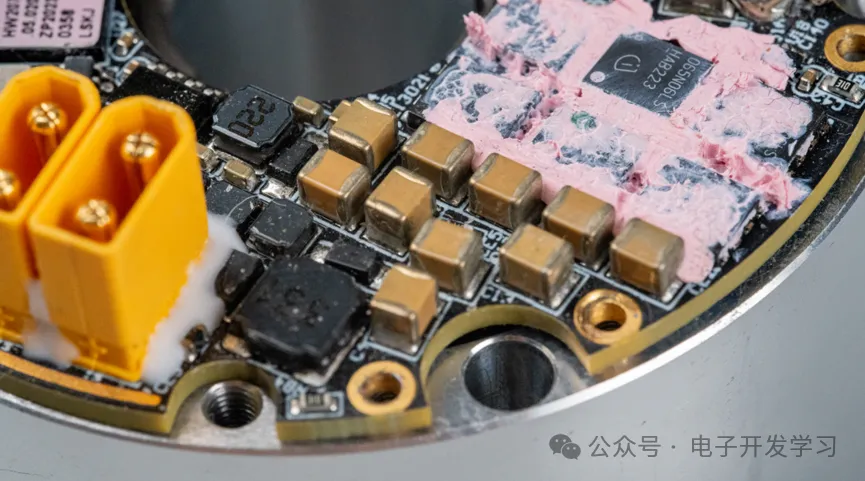
旁边用了12颗1210封装的MLCC电容,要做到支持48V供电,且要提供尽可能大的容量,假如电容的耐压是50V,可以做到10uF容值,那总容值就是120uF,总价格应该在10元左右。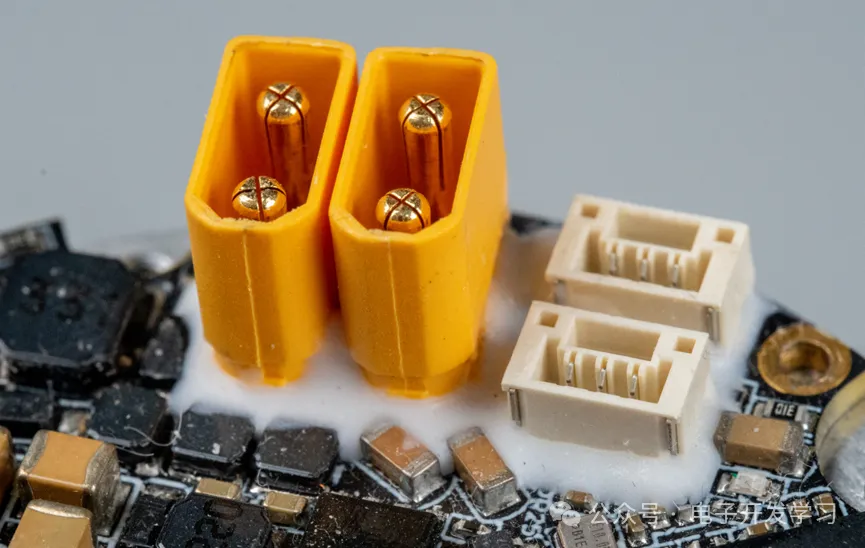
XT30和GH1.25连接器周围采用白色的硬质胶加固。
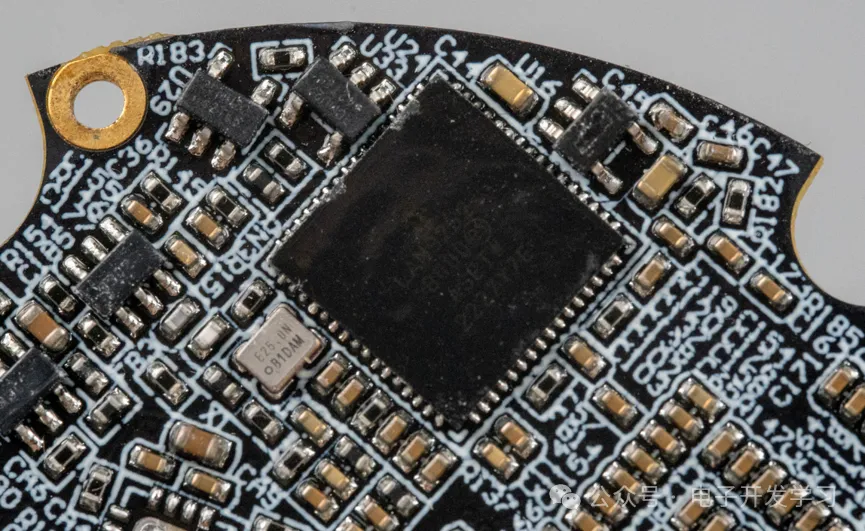
这个关节电机采用的主控芯片是Ti的TMS320F28388S,这器件在电机驱动方面有很大优势,内部有Ti的电机驱动算法软核,且支持双精度浮点运算。但是这片子的价格也很感人,估计现在200左右才能拿到。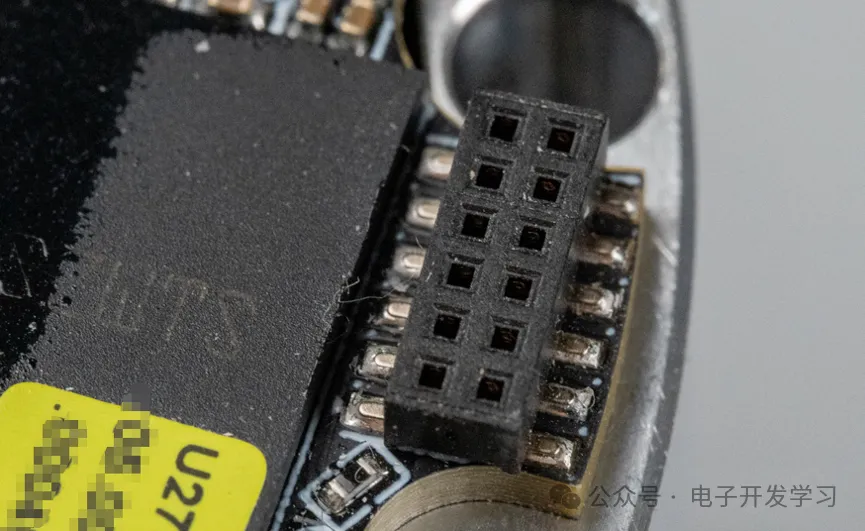
这个板子真是寸土寸金,在主控芯片旁边的半边上紧凑凑地塞了一个12P的连接器。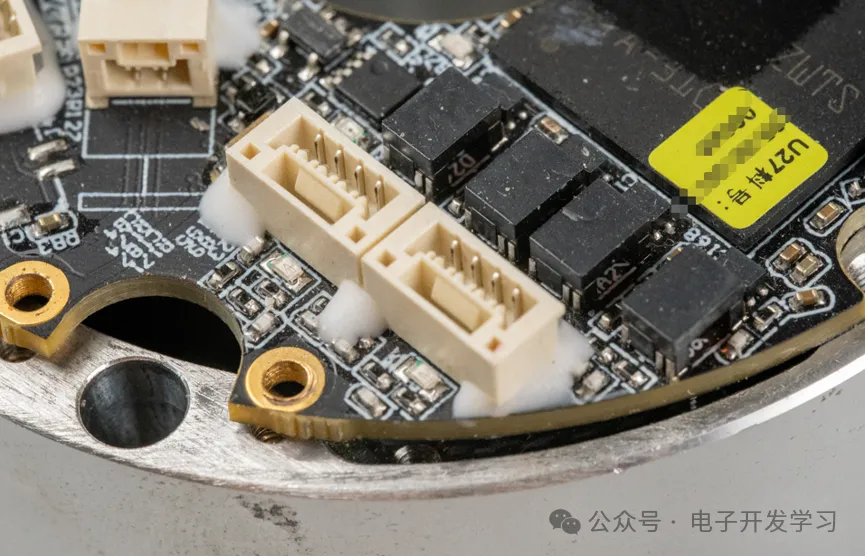
两个EtherCAT连接器信号进去都有共模滤波电感。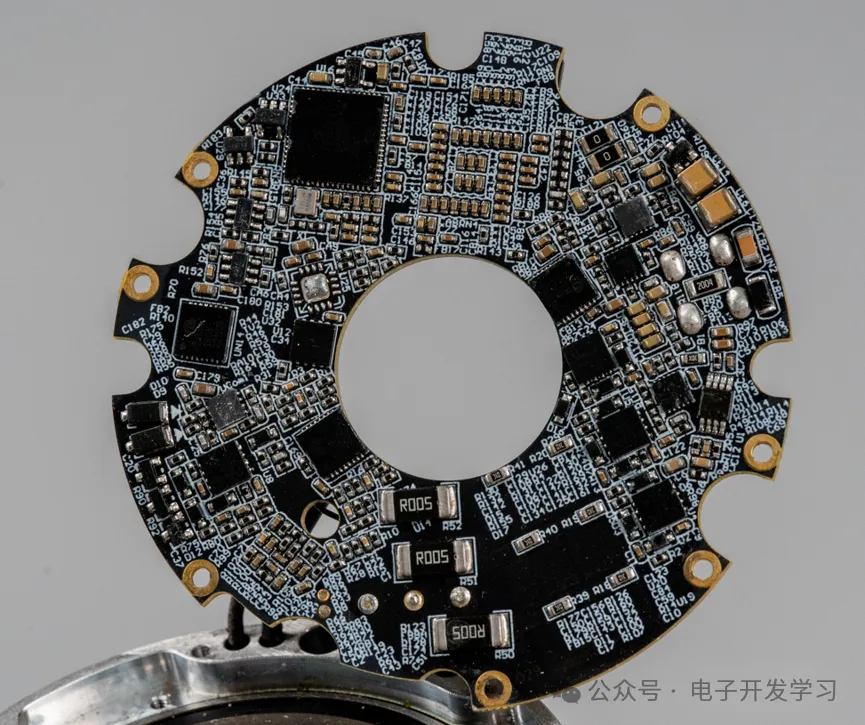
板子背面是密密麻麻的阻容和一些小尺寸IC,这个密度确实不小。背面理论上是有磁编码器的,但是由于板子涂刷了三防,实在是难以辨认出丝印及型号。
但是可以看出这个这颗最大的芯片是来自微芯的LAN9252,这是一个2/3端口EtherCAT从站控制器,集成高性能100Mbps以太网收发器。支持IEEE802.3/802.3u标准,与大多数8/16位嵌入式控制器接口。十年前我项目中用到EtherCAT,支持的芯片很少,目前支持EtherCAT的芯片貌似依然不是很多。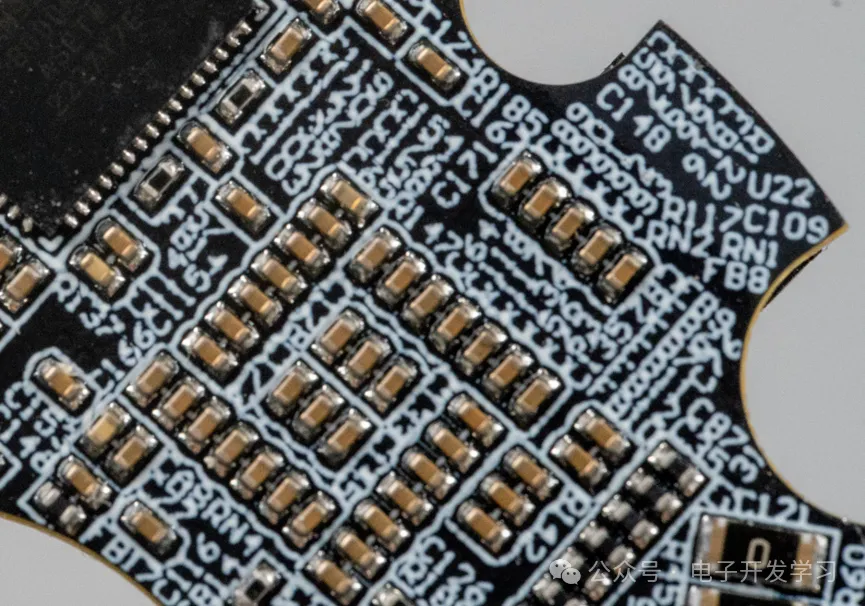
不过这个板子怎么说呢,布局密度说低不低,但说高肯定也谈不上,看起来特别密集的原因可能是板子上丝印了器件外框和位号,这使得板子看起来很紧凑,但是实际上位号丝印看的也不是很清晰,而且位号和器件有时候距离太远,想用位号来找器件太难,所以其实压根没必要把这些东西放在板子上。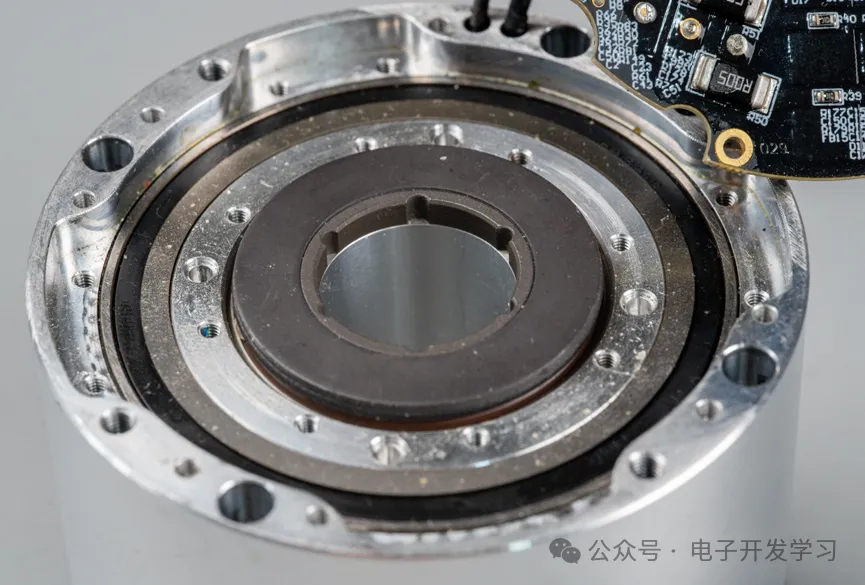
板子下面是一个磁编码器码盘。
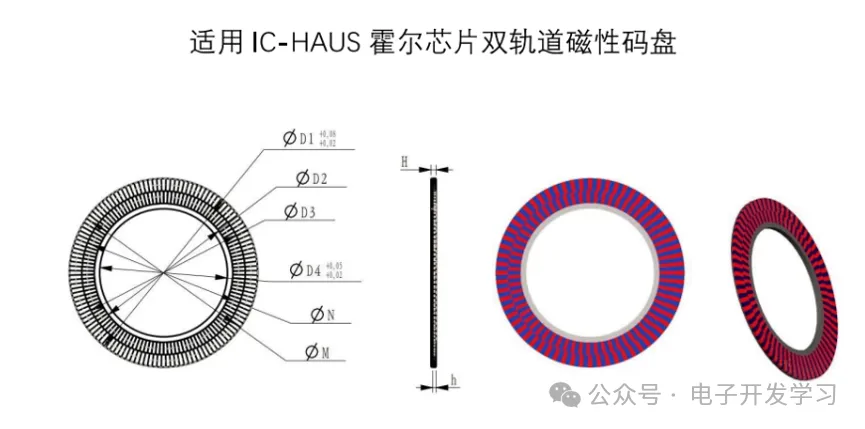
这种一般是双轨道磁性码盘。
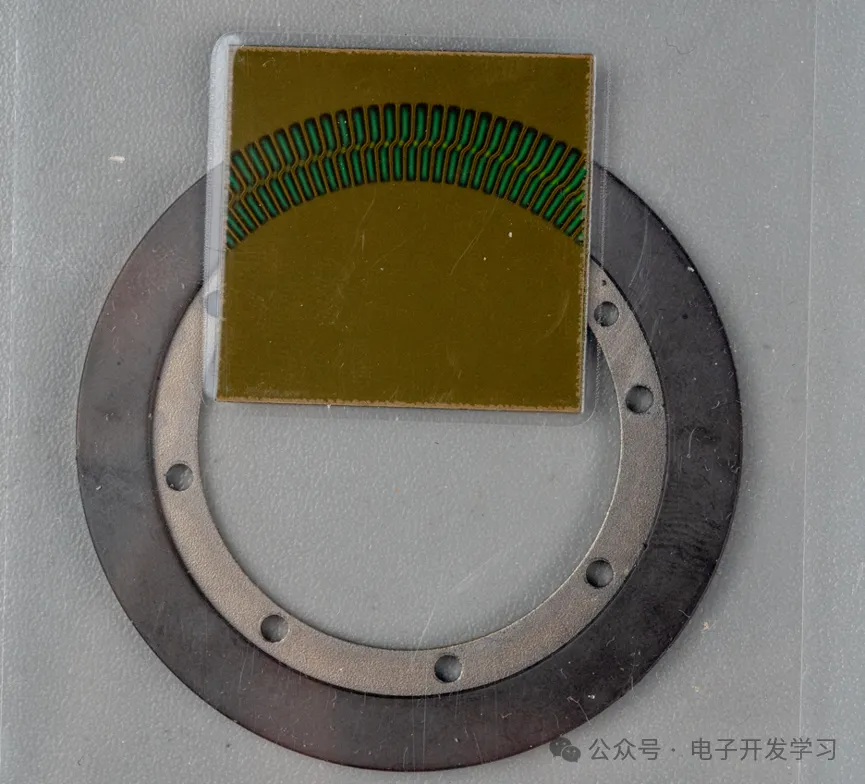
采用专用的观察片可以看到磁场分布。由于这个关节电机是朋友借给我拍照的,不太方便把芯片三防漆洗掉来观察丝印,也不太好把电机和减速器这块给拆掉,我怕减速器拆掉之后,没有专用的工具恢复不了齿轮的安装。所以简单的看看学习学习,就可以还给朋友了。等以后小马哥赚钱了直接买个人形机器人回来拆解。
文章来源于公众号-电子开发学习,仅用于学习分享,如有侵权请私聊删除
版块:
工业电子专区
前3天 15:22



全部评论