
MOLUN

极海APM32F035低压电机通用评估版开箱试用(一)
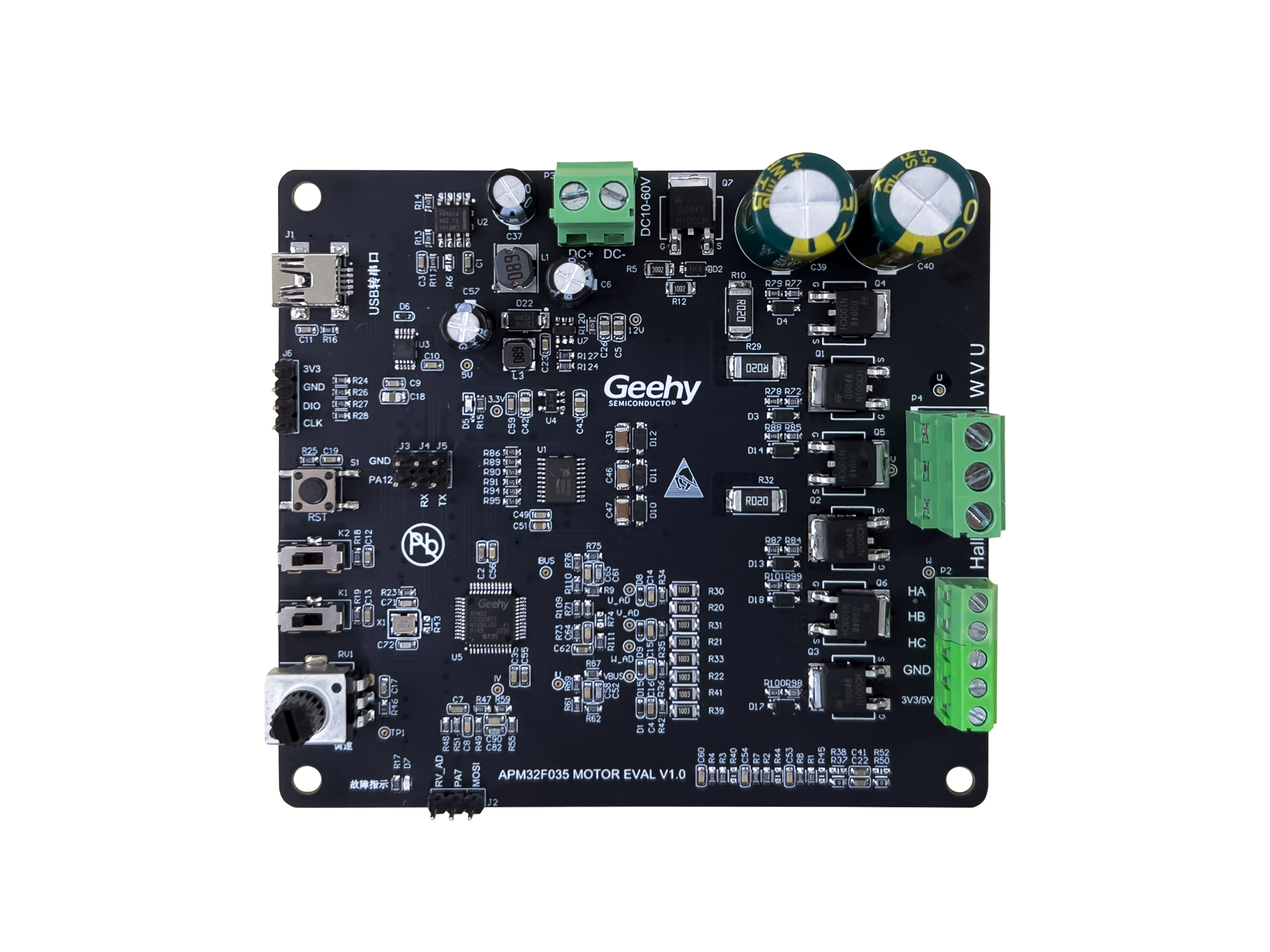
APM32F035 Motor Evaluation Board V1.0
![]()
珠海极海半导体有限公司是一家专注于工业级/车规级微控制器、模拟与混合信号IC及系统级芯片的集成电路设计企业。以下是关于该公司的一些详细信息:
1. 公司定位:作为一家高新技术企业,珠海极海半导体有限公司致力于开发工业级和车规级的微控制器(MCU),以及模拟与混合信号IC和系统级芯片。
2. 专业能力:公司拥有20年的集成电路设计经验,能够提供核心可靠的芯片产品及方案,帮助客户在智慧家居、高端消费电子、工业控制、汽车电子、智慧能源以及通信设施等领域实现技术创新。
3. 研发实力:极海建有六大芯片研发中心,遍布珠海、上海、杭州、郑州、成都以及海外,拥有超过500人的研发团队,具备国内先进的芯片设计与研发水平。
4. 知识产权:公司注重知识产权的积累,这为企业的持续发展和技术优势提供了坚实的基础。
5. 企业文化:珠海极海半导体有限公司倡导“用我们的努力,为您创造价值”的理念,致力于为客户提供高质量的服务和产品。
6. 行业地位:公司在车规级MCU市场上取得了领先地位,并获得了Arm三款CPU的永久授权,显示出其在行业内的竞争力和发展潜力。
7.企业愿景:极海立志成为国际领先的集成电路设计企业,通过科技创新加速产业升级,为客户持续创造价值。
珠海极海半导体有限公司不仅在技术研发上具有强大的实力,而且在企业文化和市场战略上也展现出明确的发展方向和目标。
极海公司推出的APM32F035系列MCU是专为电机驱动市场设计的,具有高性能和高性价比的特点。以下是该系列MCU的一些关键特性:
1. 基于Arm® Cortex®-M0+内核:这意味着APM32F035系列MCU将能够提供强大的处理能力和高效的能源管理,适合要求严格的电机控制应用。
2. 主频可达72MHz:较高的主频可以提供更快的运算速度,这对于实时性要求高的电机控制系统来说是非常重要的。
3. 内置Vector Computer(MDU+CORDIC):这些专用数学运算加速器可以提高向量计算的效率,对于复杂的电机算法和控制策略来说,这是一个显著的优势。
4. 集成高速ADC、运放、比较器及CAN控制器等外设资源:高速模拟数字转换器(ADC)可以提供精确的信号读取,运算放大器(运放)和比较器可以用于信号处理,而CAN控制器则允许与其他设备或系统进行通信,这些都是电机控制系统中不可或缺的功能。
5. 搭配电机控制通用开发平台:这可能意味着极海提供了一套完整的解决方案,包括硬件和软件,这将大大简化电机控制系统的开发过程。
6. 有效提升电机控制性能,降低产品运行成本:通过集成这些高级功能,APM32F035系列MCU旨在提供更高的性能同时降低整体的系统成本。
APM32F035系列MCU的推出,可能会对电机驱动市场产生积极的影响,为制造商提供一个强有力的工具来开发下一代高效、可靠的电机控制系统。
本次试用的极海APM32F035低压电机通用评估板,是一款为APM32F035电机控制专用MCU芯片设计的开发测试评估套件。
该评估板支持12~72V宽电压输入、最大功率100W输出,集成SCI、SPI、I2C、CAN等丰富的通信接口;支持BLDC/PMSM电机、霍尔/光电/磁编码器类型、以及单/双电机和三相反电动势的采样方式。通过该评估板,我们可以快速了解APM32F035芯片特性,加速相关电机应用开发。
APM32F035系列MCU总共有两款,区别如下图所示,本次试用的评估板主控采用APM32F035C8T7


整体硬件系统是采用外部 24V 电源供电, 并经过相应的电源降压电路转换后输 出稳定的12V、5V 、3.3V电压, 其中12V电压输出给到Gate driver IC、3.3V 电压输出给到APM32F035系列微处理器,而功率开关管则直接使用 24V 电 源。同时,该方案采用可变电阻旋钮调节 0~3.3V 的电压输入作为速度命令的输 入端, 以此调节电机转速。用户实际使用可直接通过转动可变电阻旋钮以此调节 输入电压,同时当输入电压值超过起动阈值时,电机将会启动运行, 而当电压值 低于阈值时电机将会关闭运行。
官方提供了有感/无感方波控制、有感/无感矢量控制,四种控制方案,简介框图如下:

当电机启动后,通过捕获HALL信号的跳变情况进而确认六个换相点,进行对应 六种不同的逆变器MOS管驱动顺序实现BLDC电机的六步换相。

当电机启动后,APM32F035处理器内部ADC通过外部电路采样进而检测确认反电动势过零点 信号,进行对应六种不同的逆变器MOS管驱动顺序实现BLDC电机的六步换相。

当电机启动后,APM32F035处理器通过内置的运算放大器并经由相应的采样电路可获取三相的 相电流Iu、Iv与Iw,并将该数据经过坐标轴的转换后进而控制电机的力矩电流大小及相位;通过 FOC控制计算环节后调节TMR1外设输出相应的三路互补的PWM波控制逆变器的开关元器件。

通过六次霍尔跳变,计算出转子角速度We。以霍尔区分六个扇区,采用插值补偿算法估算出转 子位置以及电机转速。当电机启动后,APM32F035处理器通过内置的运算放大器并经由相应的 采样电路可获取三相的相电流Iu、Iv与Iw,并将该数据经过坐标轴的转换后进而控制电机的力矩 电流大小及相位;通过FOC控制计算环节后调节TMR1外设输出相应的三路互补的PWM波控制逆变器的开关元器件。
具体控制方式查看附件文档或者查看官方demo例程。
尝试烧录示例代码:




貌似这两款软件暂时都不支持这款新MCU。
下载安装官方keil支持包









这是什么状况?


工程附件
APM32F035-MINIBOARD V1.0.SchDoc.pdf
APM32F035x8T7 数据手册 DraftV0.2.pdf
APM32F035x8 用户手册 Draft V0.3.pdf
AN1097_APM32F035_MOTOR EVAL无感矢量控制方案_V1.1.pdf
AN1098_APM32F035_MOTOR EVAL无感方波方控制方案_V1.1.pdf
AN1099_APM32F035_MOTOR EVAL有感矢量控制方案_V1.1.pdf
AN1100_APM32F035_MOTOR EVAL有感方波控制方案_V1.1.pdf
Geehy.APM32F035_DFP.1.0.0.zip
APM32F035低压电机评估板demo例程.zip
APM32F035_SDK_V1.0.zip
版块:
极海半导体
2024/02/20 23:19



全部评论