
乐动机器人激光雷达上位机使用说明
首先对乐动激光雷达(型号D300 LiDAR Kit)进行简单介绍,全套的配件包括雷达本体,数据线,串口小板,串口线。雷达包装的很好,由泡沫防护包装,整个盒子看起来也非常精美。

具体参数可以详见官网的介绍,(官网地址:https://www.ldrobot.com/)。

我在网上了解到乐动LD06/LD19/D300这三款激光雷达主体和参数是相同的,因此ros功能包也是一样。我手上的应该是D300系列,D300是一个开发者套装,配套了数据线和转接板。
目前了解到激光雷达应用于ros开发场景,我在淘宝店搜索分析可以适配树莓派,但是询问官方发现不单独售卖与树莓派的连接板,希望可以随后开放购买。
在官网可以下载到上位机,注意官网选项。

使用上位机,上位机已经打包在附件,注意自己电脑系统是32位还是64位系统。

连接到电脑usb接口上,观察发现串口小板红灯亮,黄灯闪烁,雷达转子快速旋转,指示雷达的工作状态。

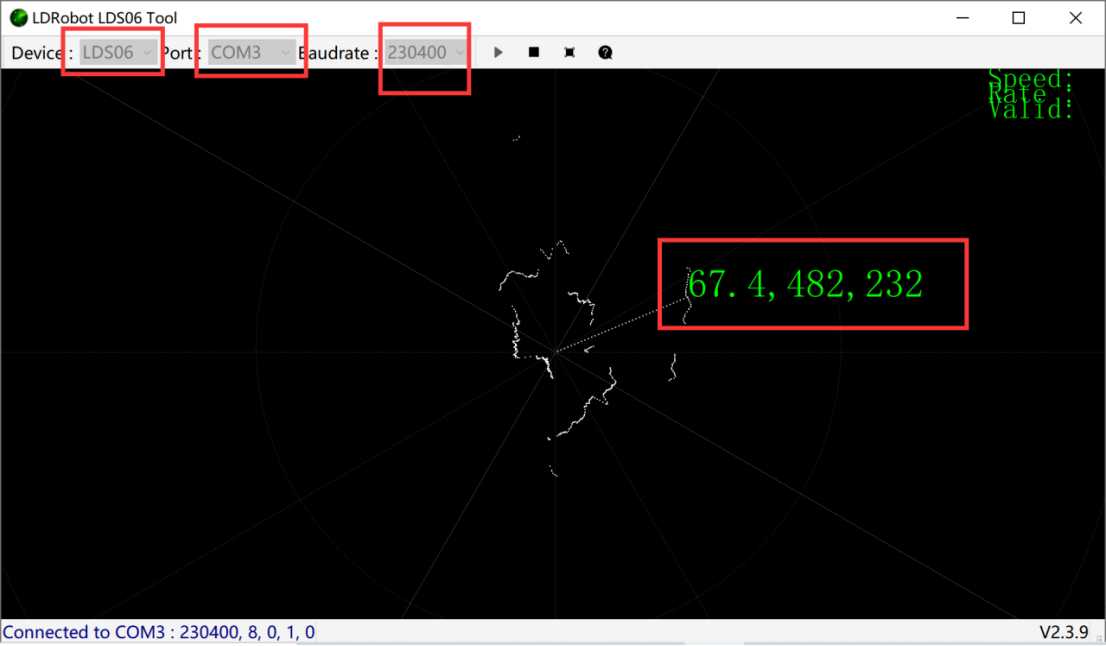
对上位机进行设置,波特率设置。Device,选择LDS06,串口选择自己电脑的串口即可,波特率默认为230400,点击开始即可进行上位机的观看。(67.4,482,232)这组数据的意义是(方向角,距离,反射信号强度)
工程附件
ld_lidar_uniform_x86.zip
2022/11/08 16:46



全部评论