
R24DVD1-硬件上手指南
原创 发布时间:2022/08/31 11:17
简介:本文面对嵌入式硬件开发工程师,详细描述云帆瑞达毫米波雷达模组R24DVD1的硬件接口,调试界面。该模组基于单收单发的4阵子天线,提供测量呼吸,运动,人体的运动速度,距离等功能。
一、雷达配件说明
1.1、硬件
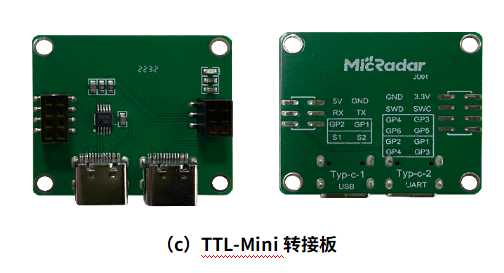
TTL-Mini转接板 1个,双Type C接口,2.0mm排母支持雷达只有拔插。
l Type C1,与R24DVD1的TX、RX通讯,直接于电脑USB接口通讯
l BType C2,与R24DVD1的烧录接口连接,用于雷达的程序更新
1.2、软件
串口助手终端或“云帆瑞达调试上位机”
l 串口助手终端,可以编辑设置具体协议,查询雷达回复协议指令。
l 云帆瑞达调试上位机,可以设置雷达的阈值、边界距离值,查询环境空间动静态值。
1.3、文档
雷达输出协议文档(标准协议+底层开放性接口协议)
l 标准协议,基于雷达默认的应用逻辑输出的标准状态,例:有人/无人,体动幅度等。
底层开放性接口协议,数字化的距离信息、运动信息、静止信息等。
二、雷达引脚说明
2.1、连接图示
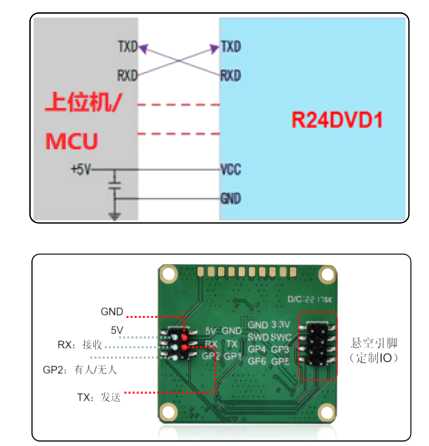
2.2、引脚详细说明
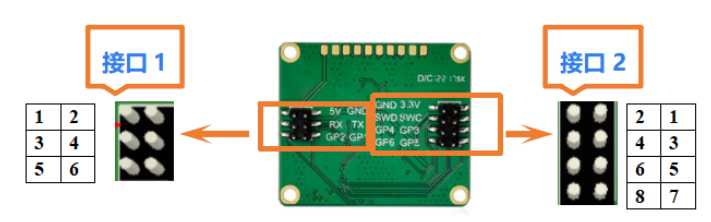
| 接口 | 引脚 | 描述 | 典型值 | 说明 | 描述 |
| 接口1 | 1 | 5V | 5.0V | 电源输入正端 | 额定电流满足IVDD=350mA |
| 2 | GND | 电源地 | |||
| 3 | RX | 3.3v | 串口接收 | TTL电平 | |
| 4 | TX | 3.3v | 串口发送 | TTL电平 | |
| 5 | GP2 | 3.3V/0V | 有人/无人 | 输出(IO电流驱动能力10mA) | |
| 6 | GP1 | 3.3V/0V | 活跃/静止 | 输出(IO电流驱动能力10mA) | |
| 接口2 | 1 | 3V3 | 3.3V | 输入电源 | 烧录输入 |
| 2 | GND | 电源地 | |||
| 3 | SWC | 保留 | SWD烧录时钟接口 | ||
| 4 | SWD | 保留 | SWD烧录数据接口 | ||
| 5 | GP3 | IO | 备用扩展引脚 | 悬空输入\输出(IO电流驱动能力10mA) | |
| 6 | GP4 | IO | 备用扩展引脚 | 悬空输入\输出(IO电流驱动能力10mA) | |
| 7 | GP5 | IO | 备用扩展引脚 | 悬空输入\输出(IO电流驱动能力10mA) | |
| 8 | GP6 | IO | 备用扩展引脚 | 悬空输入\输出(IO电流驱动能力10mA) |
三、TLL-Mini转接板
3.1、转接板外观
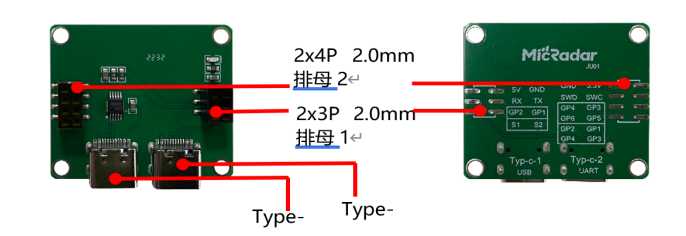
| 主要组件 | 介绍 |
| 2x3P 排母1 | 雷达供电接口5V /雷达通讯接口(3.3v TTL电平)/S1:IO输出(高电平有人/低电平无人)S2:IO输出(高电平活跃/低电平静止) |
| 2x4P 排母2 | 雷达烧录接口(3.3v/GND、SWD、SWC)GP3-GP6:IO输出 |
| Type-C1 | 作为TTL转USb接口直连PC |
| Type-C2 |
四、调试软件介绍
在前面的软硬件准备充分,硬件接口熟悉,硬件的搭建完成;接下来是软件的操作和指令的调试,由于“云帆瑞达”提供可视化的上位机软件,用户非常方便就能了解各个参数的数值和作用。
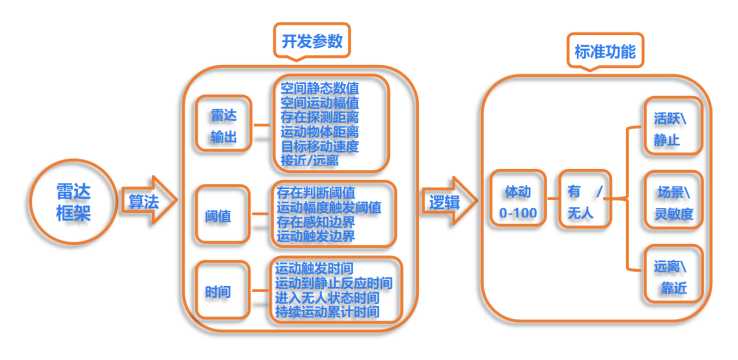
4.1、功能框架介绍
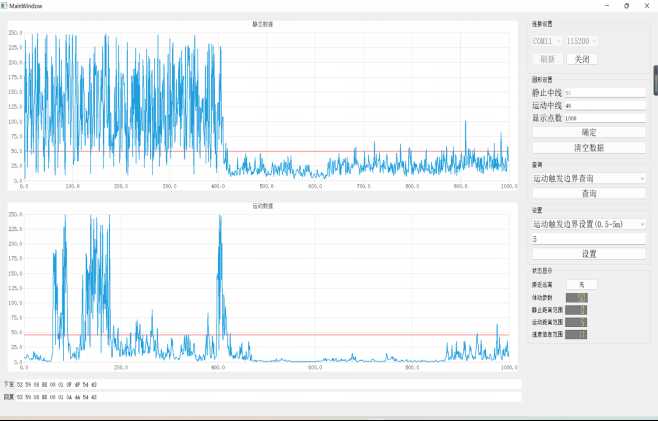
4.2、可视化上位机详细介绍
云帆瑞达可视化上位机基于串口通讯,实现雷达的数据实时采集,并且将开放参数通过数字和实时变化的波形图像来显示,更加直观清晰,用户可根据设置的光标线与雷达实时输出的波形进行对比分析。
同时,提供自动生成雷达设置的串口指令协议,节省开发者指令协议的查阅,提高开发效率。
下面9个部分分别对软件的每部分作用进行说明。
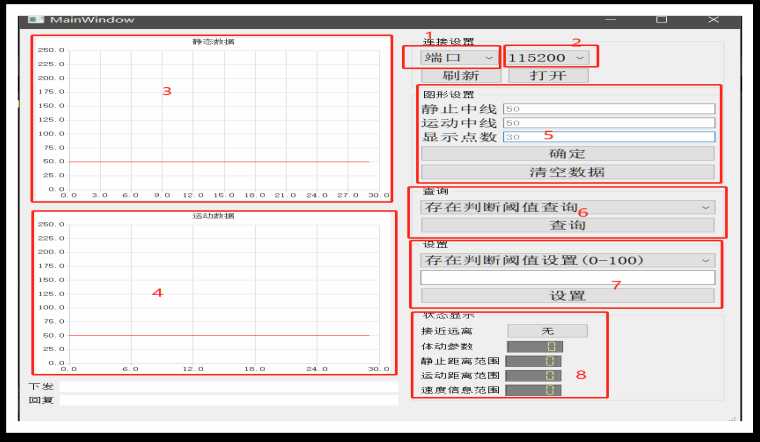
4.2.1端口
硬件接入后,根据电脑识别端口号填入。(若一直无端口显示,驱动精灵支持硬件驱动安装)
4.2.2波特率 :115200
4.2.3静态数据
显示实时的空间静态值以及设置的存在判断阈值线(静止中线)。
(空间静态值代表环境中微动底噪值,范围为0-100;空间内无人时空间静态值会在一个很低的数值范围内保持,例如0-5之间;当有人在房间中静止存在呼吸微动时,空间静态值会提高到一个较高的数值范围内保持,例如20-50之间;环境中微动物体越多,空间静态值越高;因此可通过有人和无人情况下的空间静态值做简单的有无人状态判断设定,即设置存在判断阈值)
4.2.4运动数据
显示实时的空间运动值以及设置的运动幅度触发阈值线。
(空间运动值代表环境中运动底噪值,范围为0-100;空间内无人时空间运动值会在一个很低的数值范围内保持,例如0-5之间;当有人在房间中走动或者处于运动状态时,空间运动值会提高到一个较高水平,例如50-70;环境中运动物体越多,空间运动值越高;因此可通过有人活跃、有人静止和无人情况下的空间运动值做简单的活动静止状态判断设定,即设置运动幅度触发阈值)
4.2.5图形设置
设置3、4窗口的阈值线(可理解为对比光标线),用于清晰判断实时波形与阈值之间的关系。
(基于实时的空间静态值/空间运动值的输出,可以观察到空间中不同状态时的底噪变化,根据底噪的变化可以设定存在判断阈值和运动幅度触发阈值,进行有无人/活动静止状态的简单判断,例如当有人运动时空间运动值为50-70,无人时空间运动值为0-5,即可设定运动幅度触发阈值为30,当有人运动时即超过阈值,即可做简单的运动状态判定)
l 查询:查询现阶段各参数设置值。
(关于每个参数设置值的含义,可以参考雷达功能说明文档中的功能点详细介绍)
l 设置:设置各参数阈值。
l 状态显示:该窗口显示现阶段的实时距离速度以及运动状态等。
l 协议指令:自动生成开发者要设置阈值的协议指令。
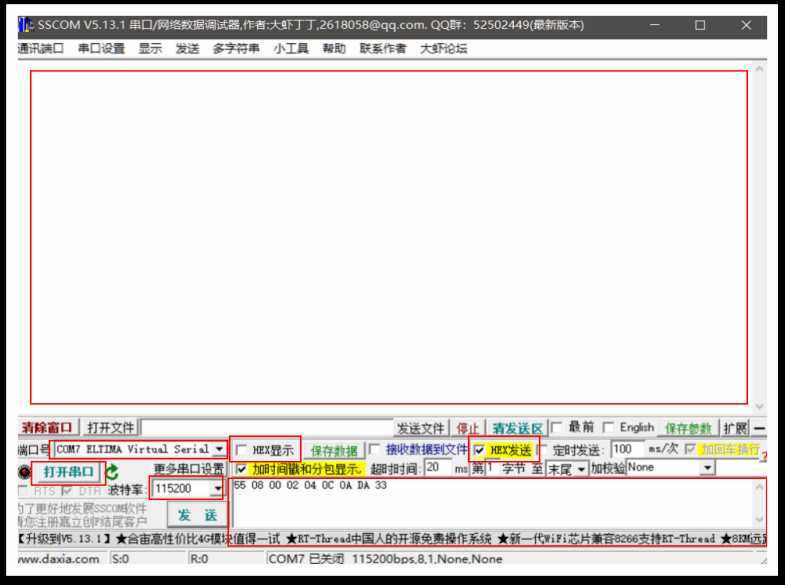
4.2.6串口助手上的指令设置和查询
最终雷达要执行的是开发者下发串口指令,在上一步的上位机调试熟悉之后,最后自己的MCU或者其他终端的代码实现,还是需要拿到具体的协议指令。
用户可参考云帆瑞达提供的文档“雷达协议文档”,串口助手工具用Hex显示即可。
用户可自行在网上找到串口助手软件,推荐“sscom”,功能丰富,兼容性强。
五、开发调试例程
雷达功能和参数设置的关系。
5.1、标准功能
示例 1 :有人 / 无人
输出方式:① 串口协议输出;
② IO输出高低电平(两者同时输出,用户可任意使用)
硬件搭建:雷达插到TTL-Mini转接板上,Type-C线接PC口,串口助手观看数据状态,且通过S1脚接万用表电压档(或者驱动一个LED灯)。
实现方式:①无人测试 → 选“无人环境”,雷达天线面对无人方向,人离开一段时间后,观察万用表数值(LED灯状态)和电脑数据,记录
时间。
②有人静止测试 → 静坐在雷达前方,保持不懂姿态,5分钟后,观察万用表数值(LED灯状态)和电脑数据,是否都能保持有人。
测试结果:如下图

5.2、开放参数
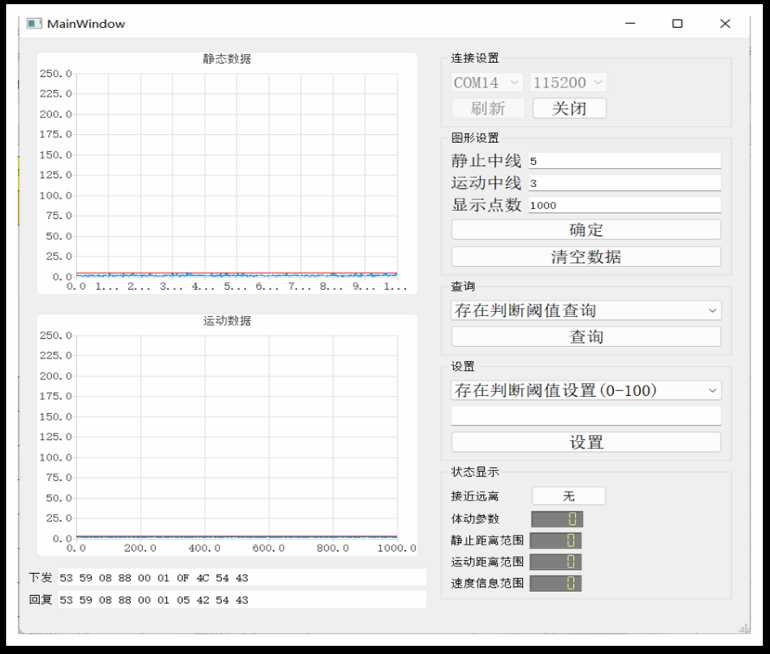
示例 2 :雷达输出参数(无人环境)
输出方式:①Micradar-可视化上位机
硬件搭建:雷达插到TTL-Mini转接板上,Type-C线接PC口,上位机观看数据状态且通过S1脚接万用表电压档(或者驱动一个LED灯)。
实现方式:①无人测试 → 选一无人环境,雷达天线面对无人方向,人离开一段时间后,观察上位机的数据。
测试结果:如下图,在状态显示,所有信息都是显示为0;在动态数据和静止数据框里,空间运动幅值在3以下,空间静态数值在5以下,用户可以根据自己实际的环境观察无人时输出数值。
总结: 无人的环境,雷达输出的空间静态数值和空间运动幅值分别再5和3以下。
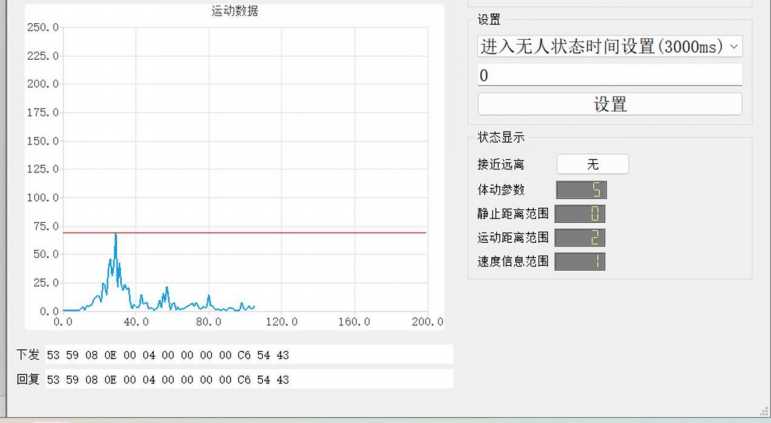
示例 3 :运动触发边界和运动幅度触发阈值的关系
输出方式:① Micradar-可视化上位机
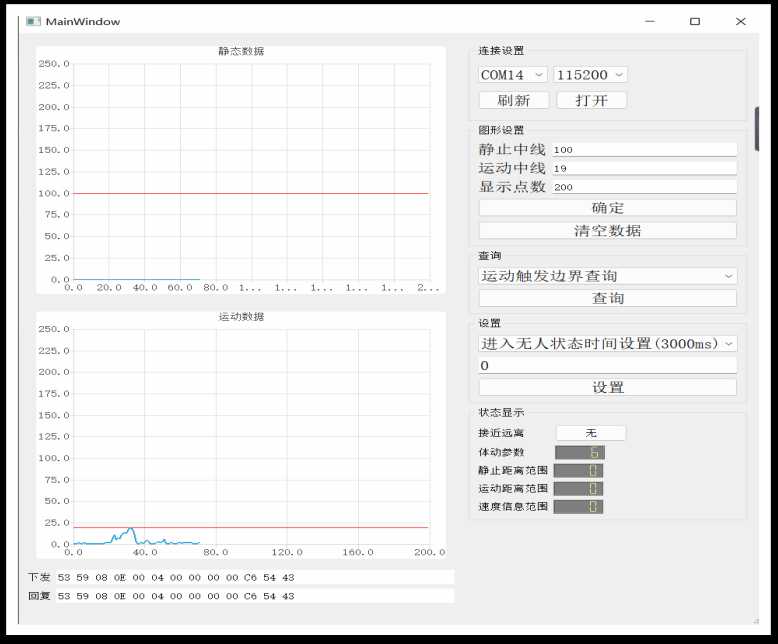
硬件搭建:雷达插到TTL-Mini转接板上,Type-C线接PC口,上位机观看数据状态,运动中线(运动幅度触发阈值19),运动触发边界设为5米。
实现方式:① 有人远处靠近雷达 -> 雷达天线面对有人方向,人缓慢走1m停5s,直到走到2米处,观察上位机的数据。
测试结果:如下图,图形设置部分,红色线为“运动中线”(运动幅度触发阈值)为19,不停靠近雷达,在运动数据框里,蓝色线为空间运动幅值在缓慢上升有尖峰达到19,为2m处满足触发条件。
总结 :运动触发边界设置为5米,在5米的位置开始,空间运动幅值开始有值(=4),还没达到设定的运动幅度触发阈值19,直到2米的位置才满足触发。所以,运动幅度触发阈值要设置>3且<19。
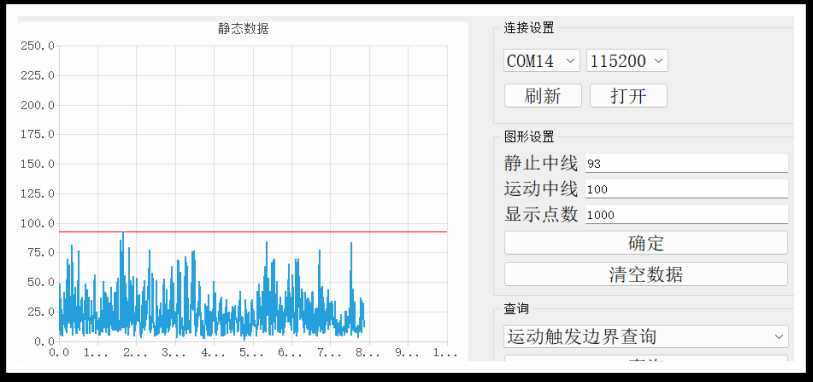
示例 4 :存在判断阈值、人员静止、存在感知边界的关系
输出方式:① Micradar-可视化上位机
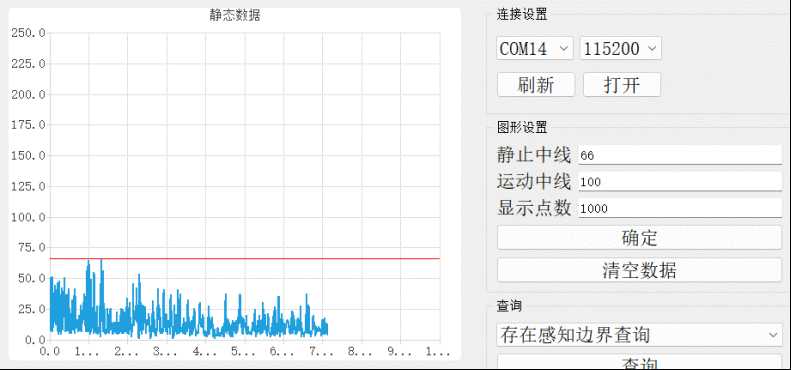
硬件搭建:雷达插到TTL-Mini转接板上,Type-C线接PC口,上位机观看数据状态,静止中线(存在判断阈值66),存在感知边界设为4米。
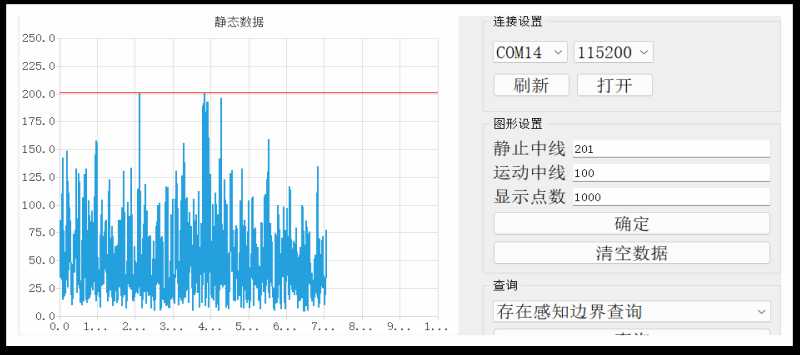
实现方式:① 有人静坐面对雷达 -> 雷达天线面对有人方向,人员静坐距离雷达2米,保持1分钟,观察上位机的数据。
测试结果:如下图,图形设置部分,红色线为“静止中线”(存在判断阈值)为66,蓝色线为空间静止数值在5-66波动,稳定的数值是5-40。
总结 :静止感知边界设置为4米,在4米的位置静坐,空间静止数值(=0),说明大于4米边界外面的距离都检测不到。所以,为了保证雷达持续检测到2米静坐的人,存在判断阈值要设置为>5(无人环境)且<40。
六、雷达EVB板的Demo用例说明
为了让更多开发者能快速在产品上使用雷达的各种开放接口,我司会提供简单的代码demo用例,开发者可根据自己的实际场景需求,调用合适的参数接口适配。更详细的内容可参考文档“R24DVD1_开发板说明书_V1.1”、“R24DVD1输出参数使用库用例”。
4.2
工程附件
1-R24DVD1-硬件上手指南-PC端 V1.0.pdf
2022/08/31 11:17



全部评论