
卢工爱分享
机器人架构全景图:人形、四足、AGV、机械臂软硬件全开源体系
做机器人产品,先把架构定清楚。人形机器人讲究全身协调,四足机器人讲究动态平衡,AGV类讲究自主导航,机械臂讲究精确轨迹规划。本文基于OpenLoong、ToddlerBot、Stanford Pupper、TurtleBot4、AR4等热门开源项目,梳理四类机器人的硬件框图、软件架构和全开源方案,让你选型有方向、开发有框架。
一、机器人分类与技术特征
| 类型 | 代表产品 | 核心能力 | 技术难点 |
|---|---|---|---|
| 人形机器人 | Atlas、GR-1、Figure | 双足行走、双手操作 | 平衡控制、全身协调 |
| 四足机器人 | Spot、Unitree、MIT Mini Cheetah | 复杂地形行走 | 动态平衡、步态规划 |
| AGV/AMR | TurtleBot、Kiva、SMARTmBOT | 自主导航、避障、多机调度 | SLAM精度、多机协调 |
| 机械臂 | UR、Kinova、FANUC | 精确抓取、轨迹规划 | 逆运动学、力控 |
本文覆盖以上四类机器人,每类都给出硬件框图、软件架构和全开源方案。
二、人形机器人类
2.1 硬件框图
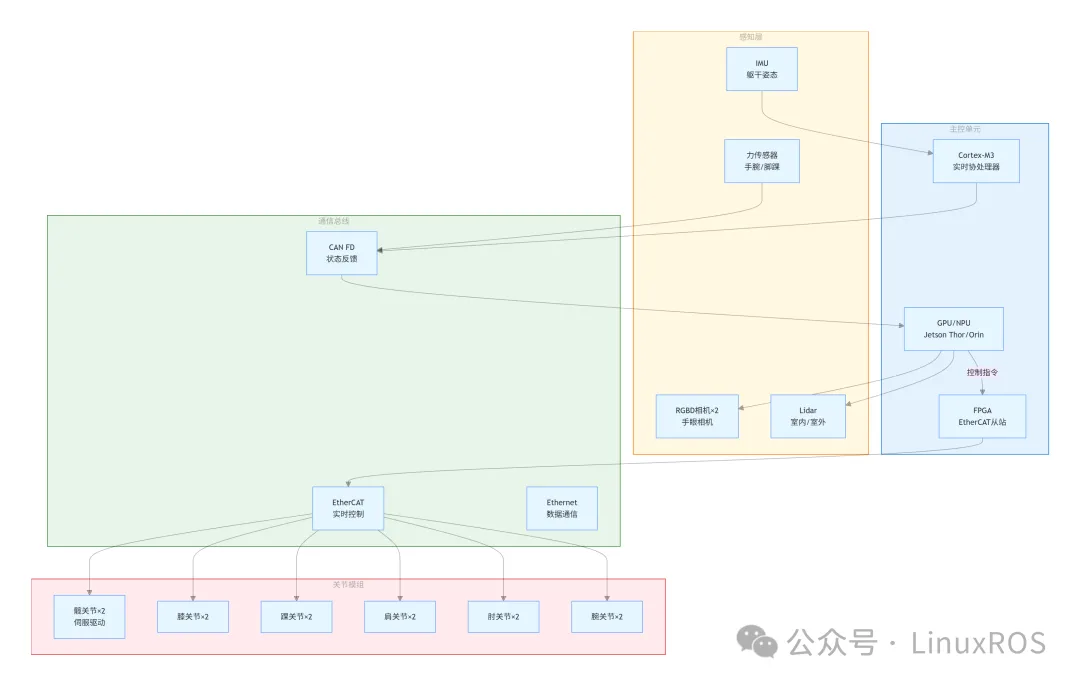
2.2 关节模组详解
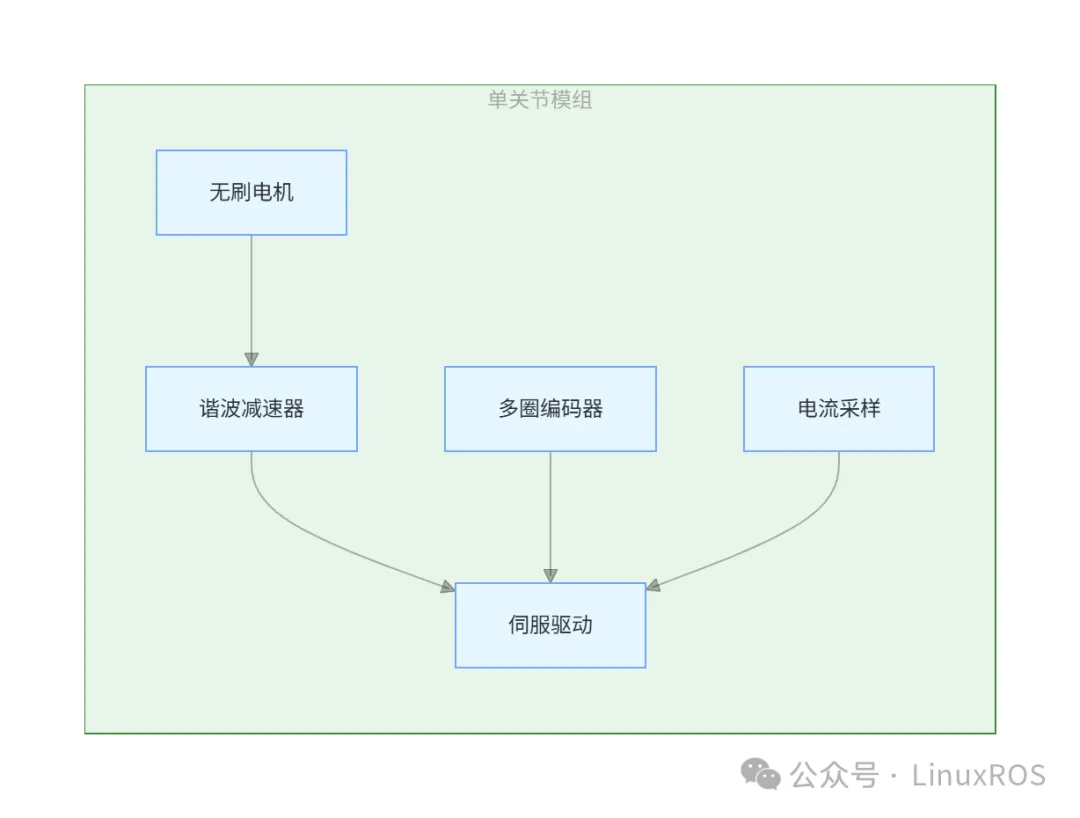
| 参数 | 低成本方案 | 工业方案 |
|---|---|---|
| 电机 | 盘式无刷/直流 | 无刷伺服 |
| 减速器 | 行星减速器 | 谐波减速器 |
| 编码器 | 磁编码器 | 多圈绝对编码器 |
| 驱动 | 简单FOC | 高性能FOC |
| 总线 | CAN | EtherCAT |
2.3 硬件选型
| 层级 | 选型方案 | 说明 |
|---|---|---|
| 主控GPU | Jetson Thor、Orin AGX、RK3588 | 运行VLA模型、NPU推理 |
| 实时协处理器 | Cortex-M3/M4、CH32V307 | 姿态监控、安全控制 |
| 关节驱动 | EtherCAT从站芯片(LAN9252)、FOC驱动 | 实时力矩控制 |
| 关节电机 | 无刷直流电机、盘式电机 | 功率密度高 |
| 减速器 | 谐波减速器(HD谐波)、行星减速器 | 低背隙、高精度 |
| 编码器 | 多圈绝对值磁编码器 | 断电位置保持 |
| 深度相机 | RealSense D435i、奥比中光Astra | 手眼视觉 |
| 力传感器 | 六维力传感器(手腕)、一维力传感器(脚踝) | 力控反馈 |
| IMU | BMI088、ICM42688 | 姿态解算 |
| 通信总线 | EtherCAT(实时控制)、CAN FD(状态反馈)、Ethernet(数据) | 多总线融合 |
2.4 软件架构
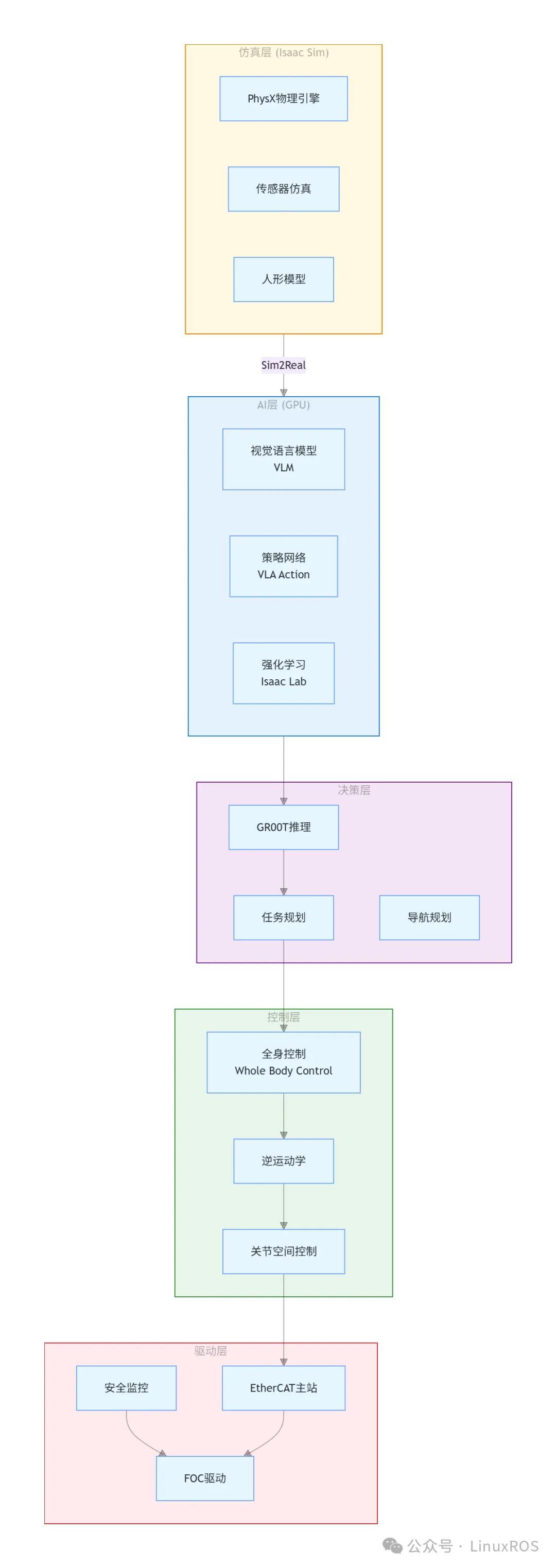
2.5 VLA模型架构(GR00T)
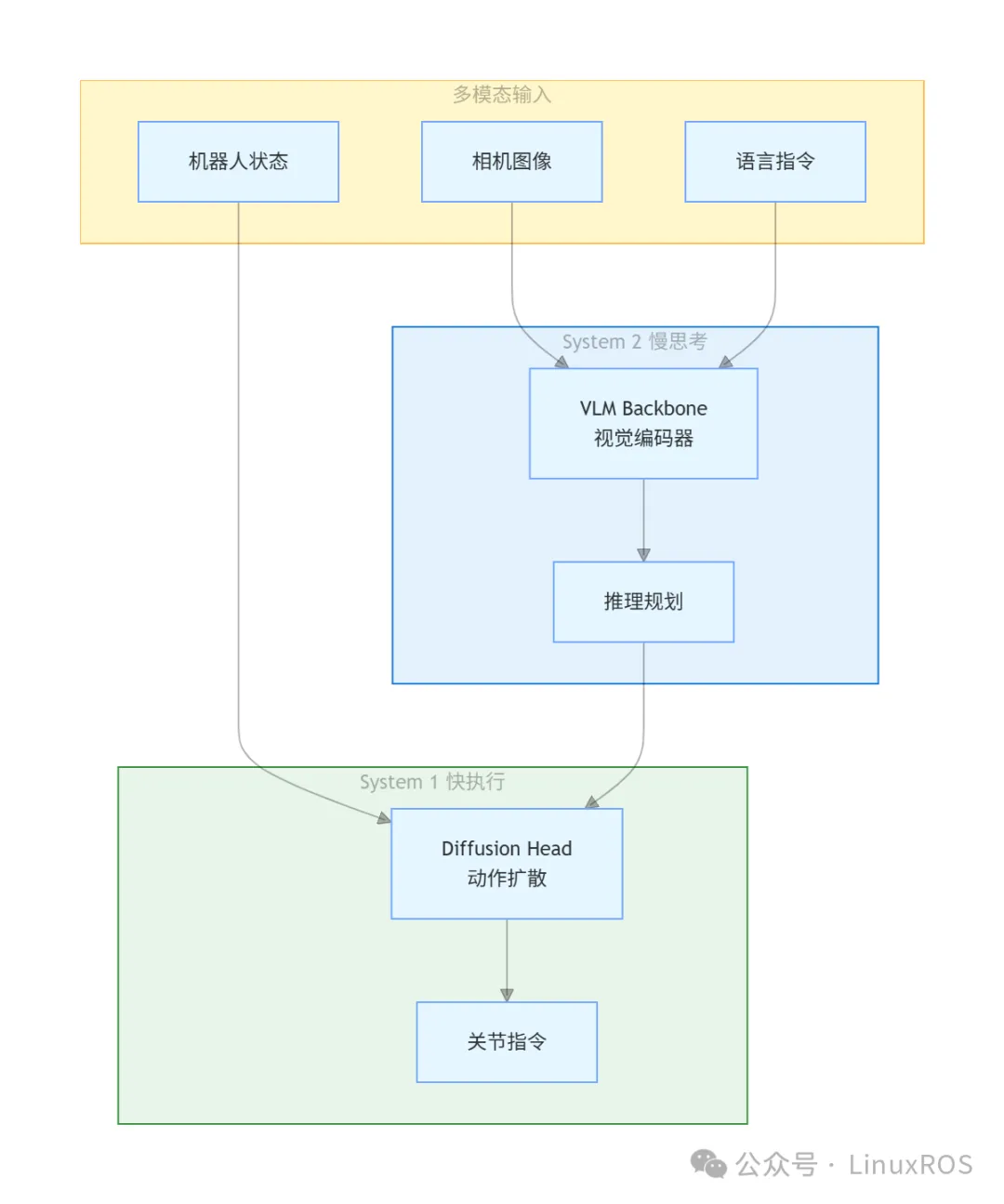
| 组件 | 说明 | 性能 |
|---|---|---|
| VLM Backbone | 视觉语言编码器 | 处理图像+文本 |
| System 2 | 慢思考,规划高层动作 | 推理频率~1Hz |
| Diffusion Head | 扩散模型生成动作 | 控制频率~120Hz |
| Embodiment ID | 区分不同机器人构型 | 支持52 DoF |
2.6 全软件与全硬件开源项目
| 项目 | GitHub | 硬件开源 | 软件开源 | 特点 |
|---|---|---|---|---|
| OpenLoong 青龙 | loongOpen | ✅ CAD/PDF完全开源 | ✅ MPC+WBC+仿真 | 中国首个全套开源人形,60 DOF,400 TOPS |
| ToddlerBot | hshi74/toddlerbot | ✅ 3D打印+BOM全开源 | ✅ PPO/扩散策略+仿真 | 斯坦福出品,30 DOF,$6K BOM,能翻跟头 |
| OriginMan | originbot/originman | ✅ 全开源 | ✅ ROS2+大模型 | 首个全开源桌面人形,10 TOPS RDK X5 |
| Reachy 2 | pollen-robotics/reachy | ✅ 机械结构开源 | ✅ ROS2+Python SDK | Pollen Robotics,7DOF双臂,Docker部署 |
| Isaac GR00T | nvidia/Isaac-GR00T | — | ✅ VLA基础模型 | NVIDIA官方,VLM+Diffusion动作生成 |
| Isaac Lab | nvidia/IsaacLab | — | ✅ 强化学习框架 | Isaac Gym后继,GPU并行训练 |
2.7 全身控制(WBC)架构
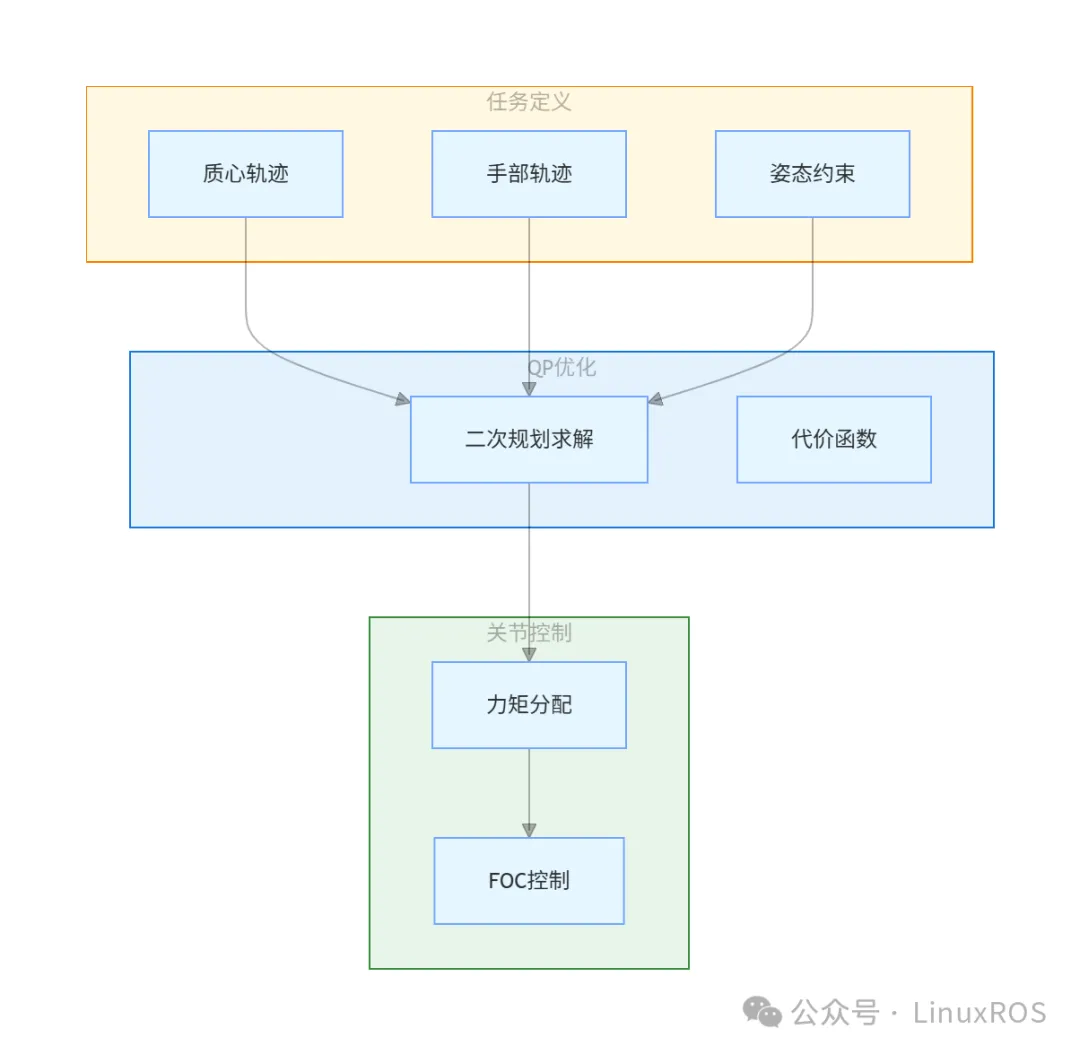
// QP优化求解伪代码
// min: 0.5 * x'Hx + g'x
// s.t: Aeq * x = beq(等式约束:运动学)
// Aineq * x <= bineq(不等式约束:关节限位、力矩限制)
Eigen::Matrix<double, Dynamic, Dynamic> H; // Hessian矩阵
Eigen::Matrix<double, Dynamic, 1> g; // 梯度向量
Eigen::Matrix<double, Dynamic, Dynamic> A; // 约束矩阵
// 添加任务Jacobian
H += Jt * Wt * J; // 任务权重
g -= 2 * Jt * Wt * x_des; // 目标轨迹
// 求解
qdot = qp_solver.solve(H, g, A, b); // 关节速度
三、四足机器人
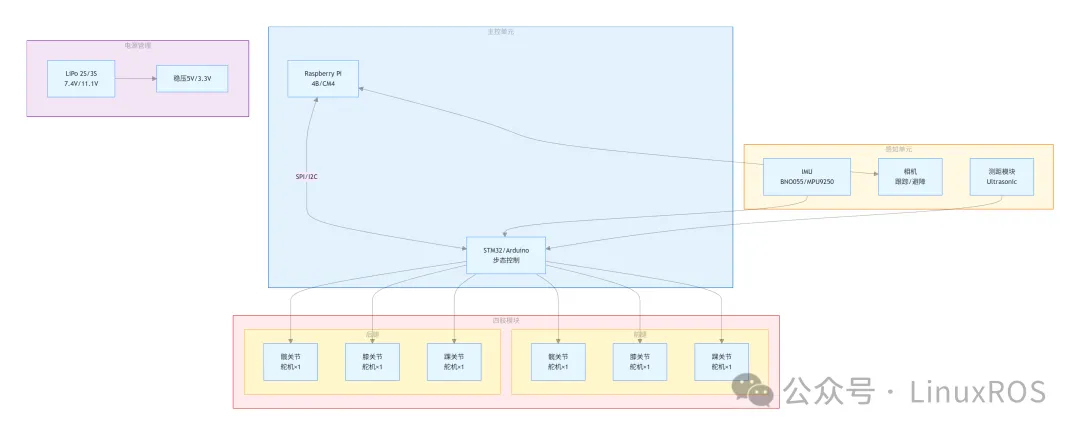
3.1 硬件框图
3.2 硬件选型
| 层级 | 选型方案 | 说明 |
|---|---|---|
| 主控SBC | Raspberry Pi 4B/CM4、Jetson Nano | 运行ROS2、视觉处理 |
| 运动MCU | Arduino Nano、STM32F4 | 步态PS2控制、12路PWM |
| 关节舵机(低成本) | MG996R、串行总线舵机 | 成本<¥200/个,适合教学 |
| 关节舵机(高性能) | Dynamixel-X、高扭无刷 | 力矩反馈,适合科研 |
| IMU | BNO055、MPU9250 | 9轴绝对姿态 |
| 相机 | 树莓派Camera、RealSense | 视觉跟踪、避障 |
| 电源 | LiPo 2S(7.4V)或3S(11.1V) | 轻量化 |
| 通信 | PS4/Xbox手柄蓝牙、WiFi/ROS2 | 遥控+自主 |
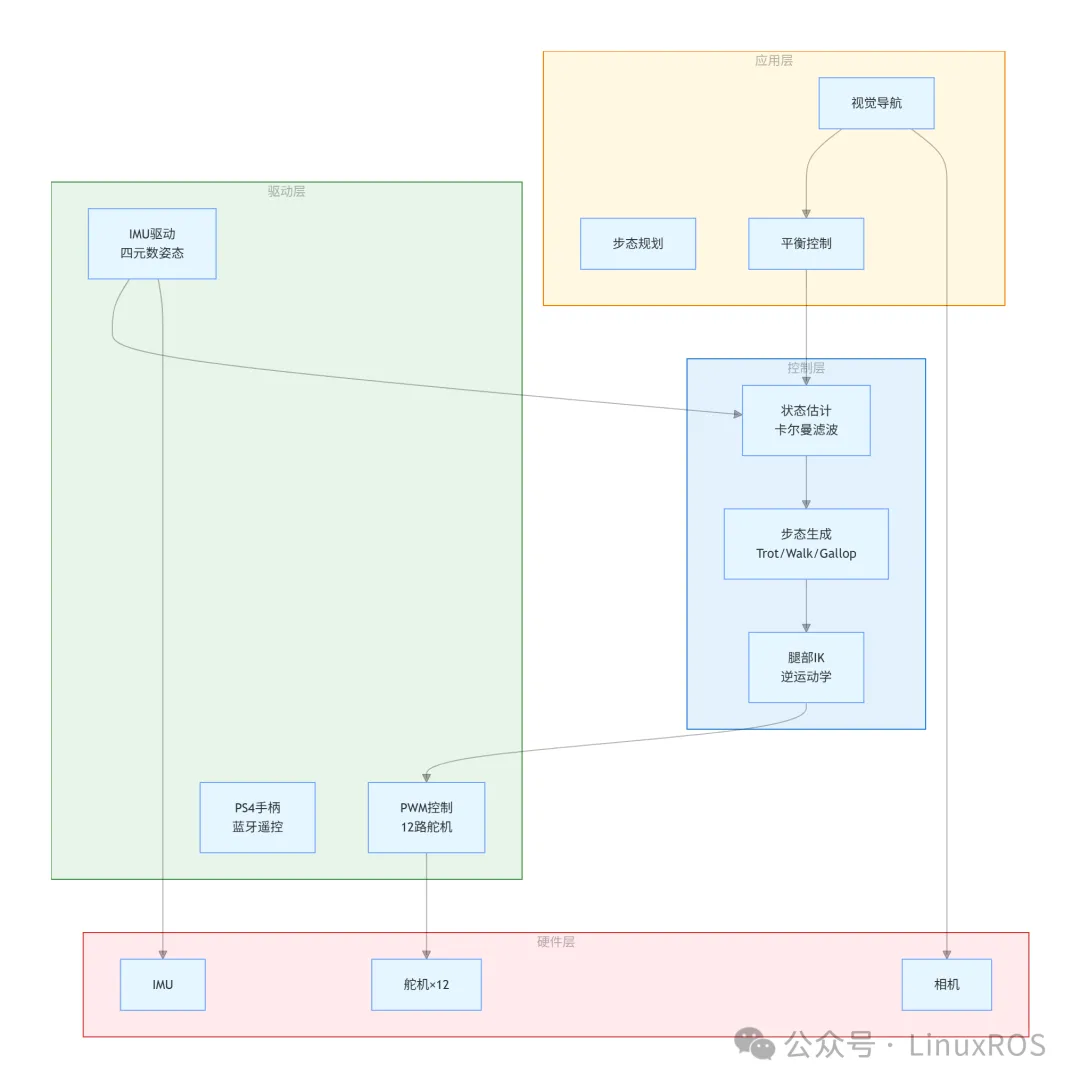
3.3 软件架构
3.4 全软件与全硬件开源项目
| 项目 | GitHub | 硬件开源 | 软件开源 | 特点 |
|---|---|---|---|---|
| Stanford Pupper | stanfordroboticsclub/StanfordQuadruped | ✅ BOM+3D打印 | ✅ Python | 斯坦福出品,成本<$600,12DOF |
| Mini Pupper | mangdangroboticsclub/mini_pupper | ✅ KiCAD PCB | ✅ ROS2+Python | 开源ROS狗,支持SLAM导航 |
| Dingo Quadruped | Yerbert/DingoQuadruped | ✅ 基于Pupper | ✅ ROS Noetic | 低成本研究平台,Gazebo仿真 |
| Stanley Quadruped | Ahead.IO Hackaday | ✅ 全开源 | ✅ PyBullet仿真 | 加拿大Ahead.IO,capstan绳索驱动BLDC四足,支持跳跃 |
| Hiwonder ROSPug | 商业开源 | ✅ 铝合金机身 | ✅ ROS+Jetson Nano | Jetson Nano驱动,TOF Lidar |
Stanford Pupper是四足入门首选——全开源硬件+软件,总BOM成本<$600,适合教育和研究。
四、AGV类机器人
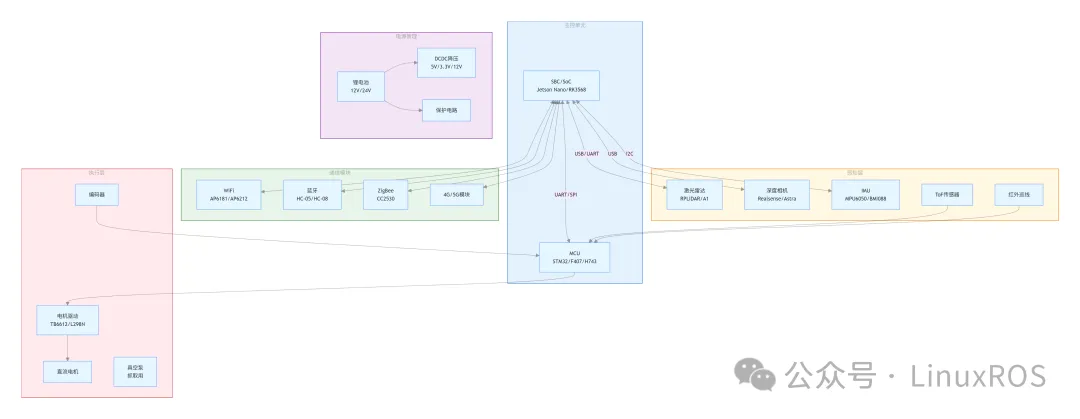
4.1 硬件框图
4.2 硬件选型
| 层级 | 选型方案 | 说明 |
|---|---|---|
| 主控SBC | Jetson Nano、RK3568、树莓派CM4 | 运行ROS2,处理SLAM和导航 |
| 主控MCU | STM32F4/H7、CH32F2 | 实时电机控制、PID闭环 |
| 激光雷达 | RPLIDAR A1/A2、思岚A1 | 2D SLAM必备 |
| 深度相机 | Realsense D435i、奥比中光Astra | 3D感知、RGB-D |
| IMU | MPU6050、BMI088 | 姿态解算、里程计融合 |
| 电机驱动 | TB6612(小型)、ODrive(大型) | PWM控制、电流反馈 |
4.3 软件架构
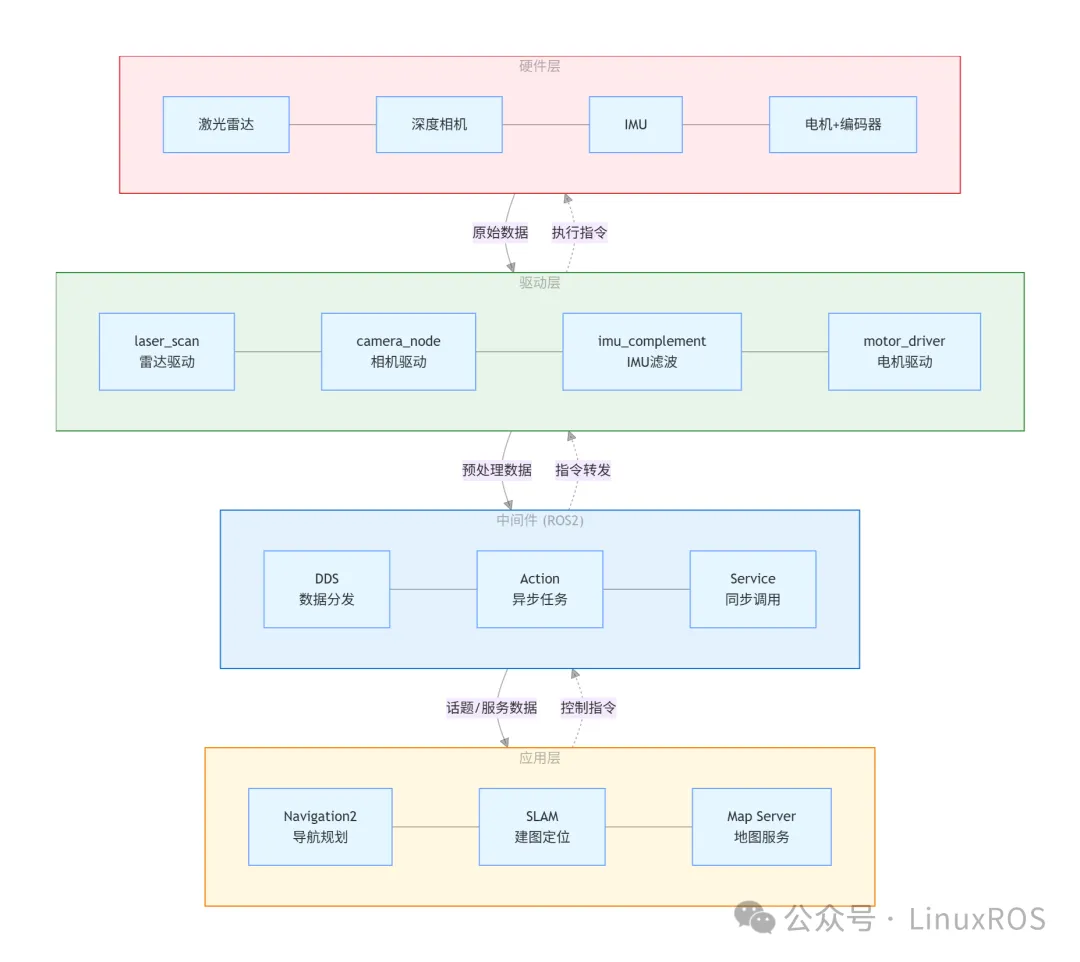
4.4 典型开源项目
| 项目 | GitHub | 特点 |
|---|---|---|
| TurtleBot4 | turtlebot/turtlebot4 | ROS2标准平台,iRobot Create 3底座 |
| SMARTmBOT | SMARTlab-Purdue/SMARTmBOT | Purdue大学开源,低成本$210 |
| Navigation2 | ros-planning/navigation2 | ROS2官方导航栈 |
| Cartographer | google/cartographer | 激光SLAM标杆 |
| SLAM Toolbox | SteveMacenski/slam_toolbox | 在线SLAM工具箱 |
4.5 核间通信(SBC+MCU)
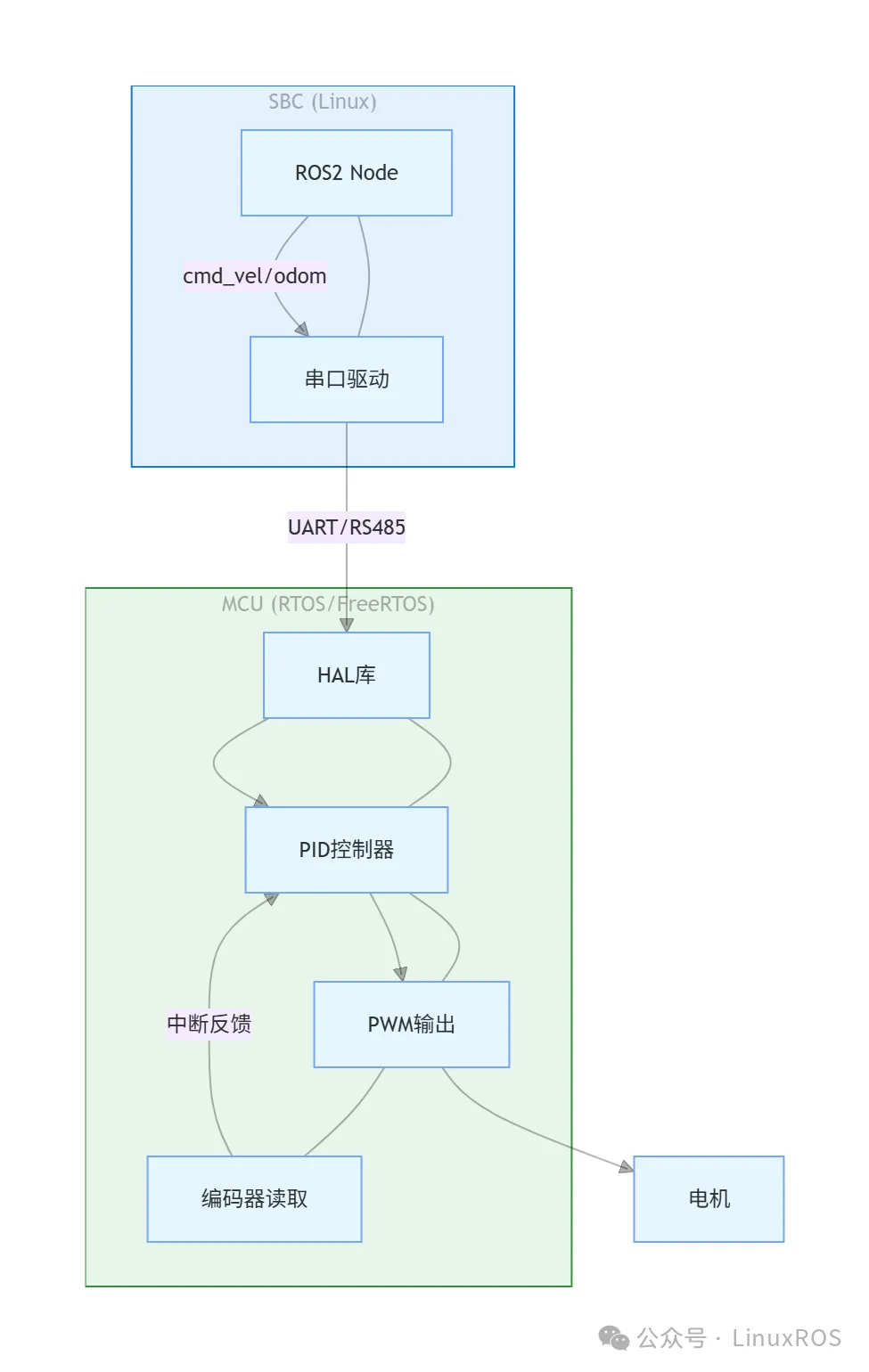
常用协议:
- 串口:自定义协议(Header+Len+Data+CRC)
- CAN总线:工业标准,多电机协调
- Micro-ROS:ROS2直接跑在MCU上
# Micro-ROS STM32示例
# MCU端:发布/订阅ROS2话题
rclc_publisher_init_default(&publisher, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32), "topic");
# SBC端:启动micro-ROS agent
ros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyUSB0
五、机械臂
5.1 硬件框图
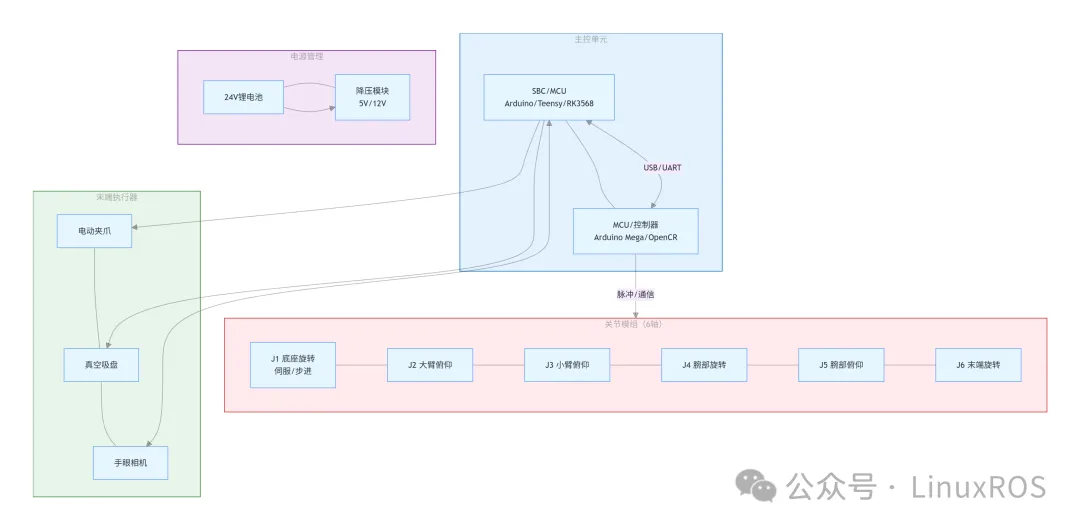
5.2 硬件选型
| 层级 | 选型方案 | 说明 |
|---|---|---|
| 主控MCU | Arduino Mega/Teensy 4.1、OpenCR | 方案成熟,社区支持强 |
| SBC(高级) | Jetson Nano、RK3568 | ROS2+MoveIt2 |
| 关节舵机 | 串行总线舵机、Dynamixel-X | 位置+速度+力矩反馈 |
| 关节电机(工业) | 步进电机、无刷伺服 | 高精度、大扭矩 |
| 减速器 | 同步带、谐波减速器 | 低成本→同步带;高精度→谐波 |
| 编码器 | 磁编码器、光学编码器 | 闭环控制 |
| 末端工具 | 电动夹爪、真空吸盘 | 换工具适配不同任务 |
| 手眼相机 | OpenCV USB相机、Realsense | 2D/3D视觉定位 |
| 通信 | UART/RS485(舵机)、Ethernet(ROS2) | 成本→串行总线;性能→EtherCAT |
5.3 软件架构
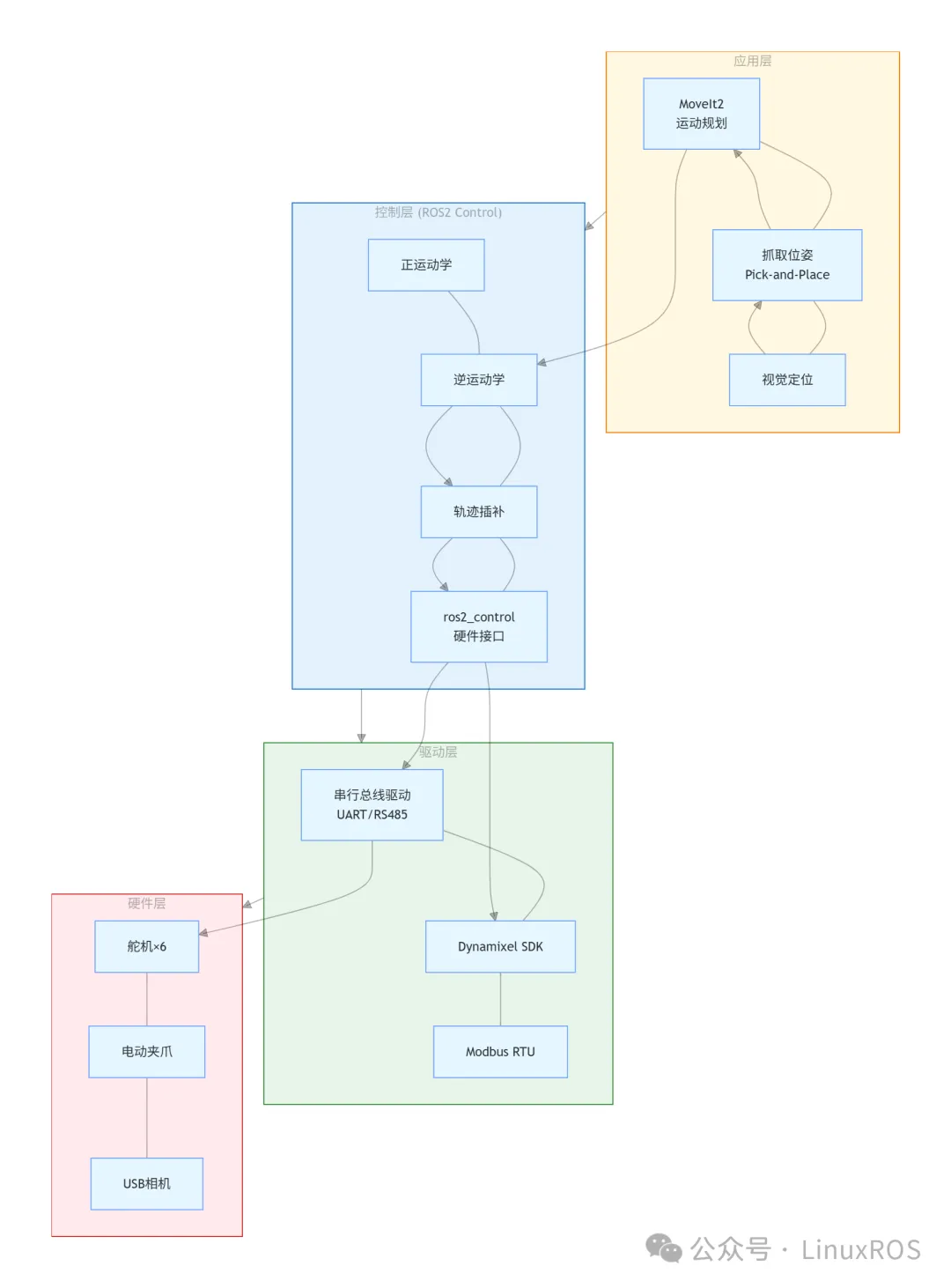
5.4 全软件与全硬件开源项目
| 项目 | GitHub | 硬件开源 | 软件开源 | 特点 |
|---|---|---|---|---|
| AR4 | Annin-Robotics/ar4_ros_driver | ✅ 3D打印/铝合金 | ✅ Python+ROS2 | 6轴桌面级,社区20K+用户 |
| OpenManipulator-X | ROBOTIS-GIT/open_manipulator | ✅ 全开源 | ✅ ROS2+MoveIt2 | ROBOTIS官方,与TurtleBot3兼容 |
| OMY系列 | ROBOTIS-GIT/open_manipulator | ✅ 6轴 | ✅ ROS2 Jazzy | 模仿学习专用,Dynamixel-Y舵机,3kg负载 |
| MoveIt 2 | moveit/moveit2 | — | ✅ 运动规划框架 | 机械臂通用,支持避障+轨迹优化 |
| ros2_control | ros-controls/ros2_control | — | ✅ 控制框架 | 硬件抽象层,统一舵机/电机接口 |
AR4和OpenManipulator是实现全开源(软件+硬件+3D打印文件)的标杆项目。
六、四类机器人架构对比
| 维度 | 人形机器人类 | 四足机器人 | AGV类 | 机械臂 |
|---|---|---|---|---|
| 自由度 | 20-52 DoF(全身关节) | 12-18 DoF(四肢) | 2-4 DoF(移动+升降) | 4-6 DoF(关节旋转) |
| 控制频率 | 100-1000Hz | 50-200Hz | 50-100Hz | 50-200Hz |
| 主控算力 | 100+ TOPS | 1-10 TOPS | 1-10 TOPS | 1-10 TOPS |
| 感知侧重 | 立体相机、力传感器 | IMU、相机、超声波 | 2D激光、深度相机 | 手眼相机、力传感器 |
| 通信总线 | EtherCAT、CAN FD | PWM/CAN | UART、CAN | UART/RS485、EtherCAT |
| 开源生态 | OpenLoong、Isaac Lab、GR00T | Stanford Pupper、Mini Pupper | Navigation2、TurtleBot | AR4、OpenManipulator |
| 开发难度 | 高 | 中 | 中 | 中 |
6.1 共同技术点
| 技术 | 人形 | 四足 | AGV | 机械臂 |
|---|---|---|---|---|
| 运动学 | 全身IK | 腿部IK | 差速运动模型 | FK/IK正逆运动学 |
| 导航 | 脚步规划 | 步态规划 | Nav2全局路径规划 | 轨迹规划 |
| 感知 | 手眼协调 | 姿态感知 | 障碍物检测 | 手眼视觉 |
| 控制 | 全身WBC | 步态PID | 差速PID | PID+力矩 |
| 安全 | 碰撞检测、力限 | 跌倒检测 | 急停、避障 | 碰撞检测 |
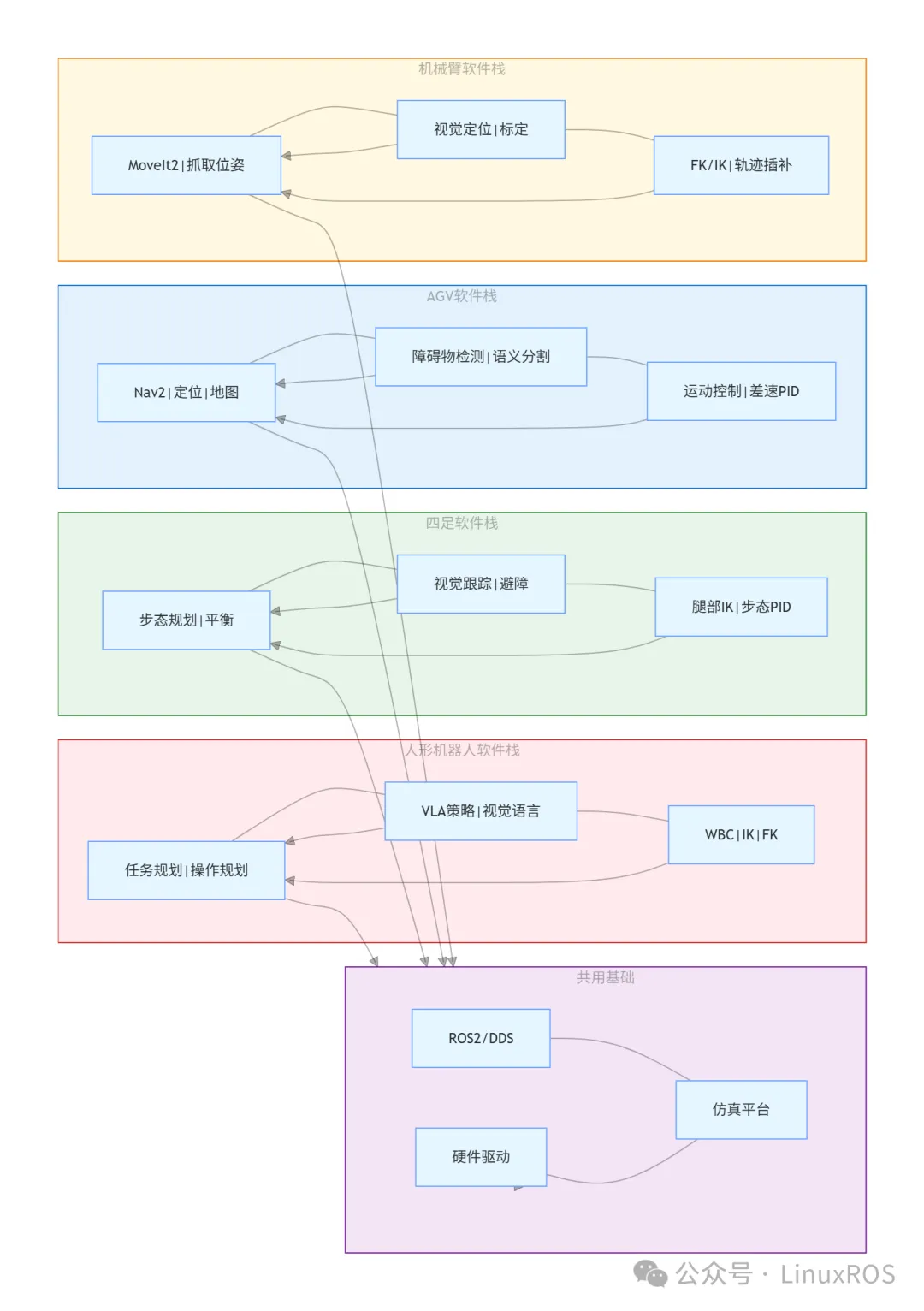
6.2 软件栈对比
七、开发路线图
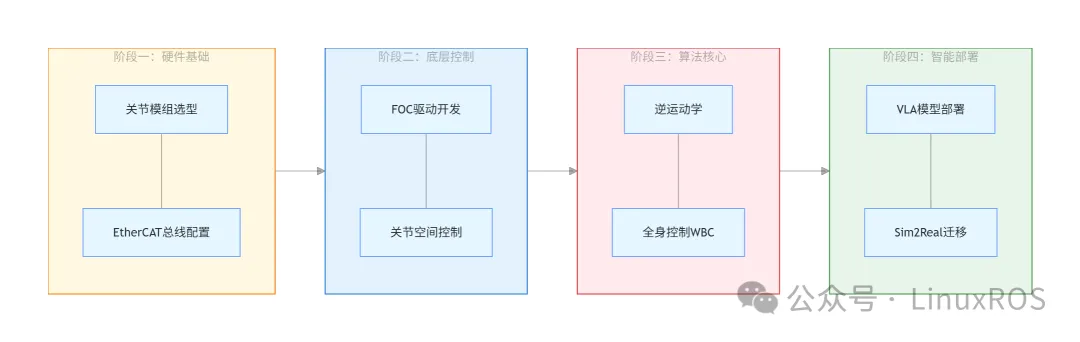
7.1 人形机器人开发路线
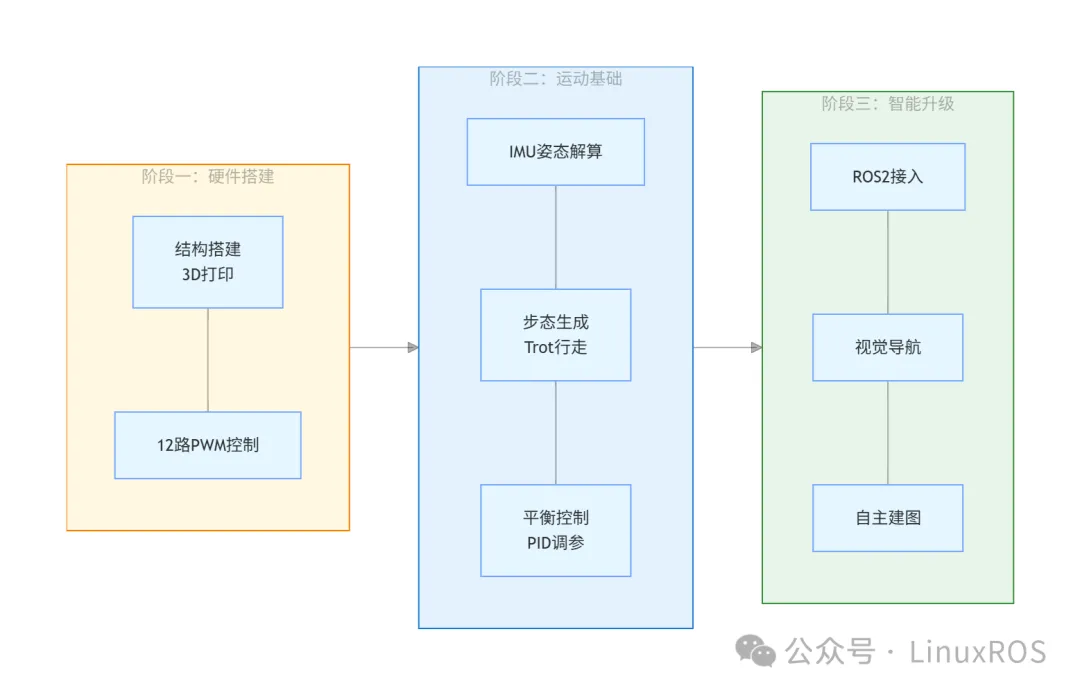
7.2 四足开发路线
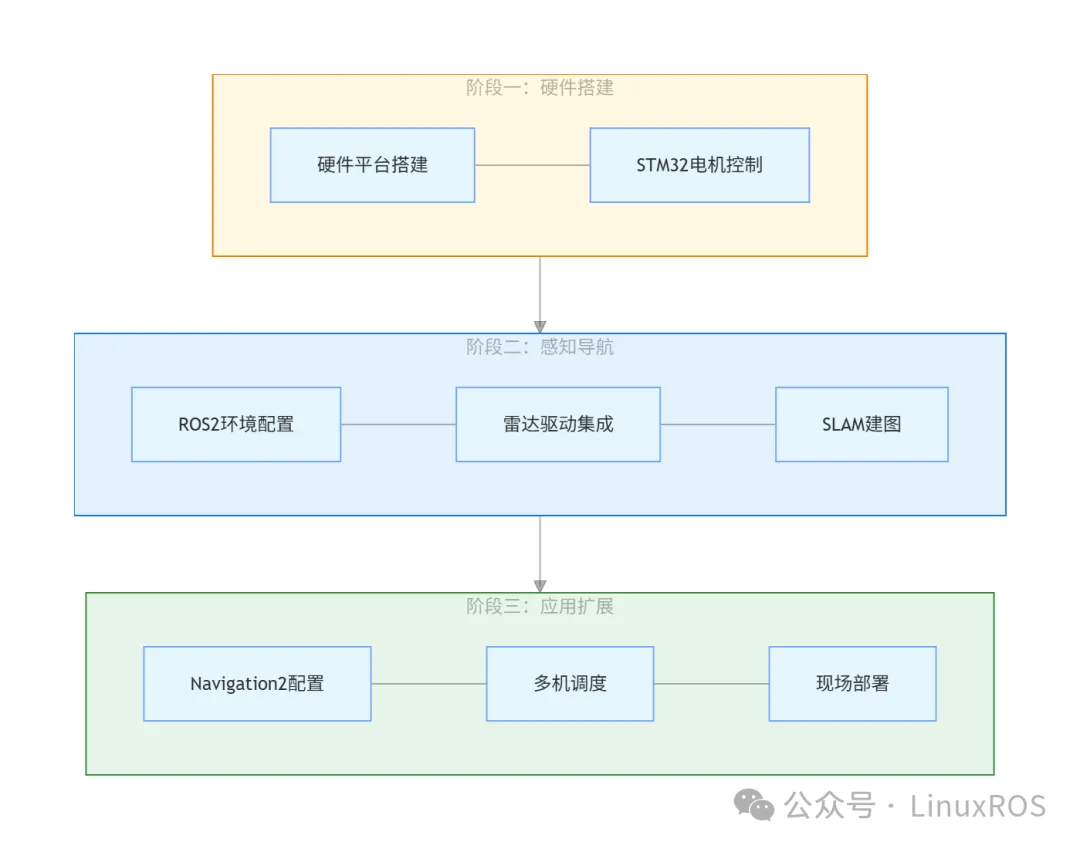
7.3 AGV开发路线
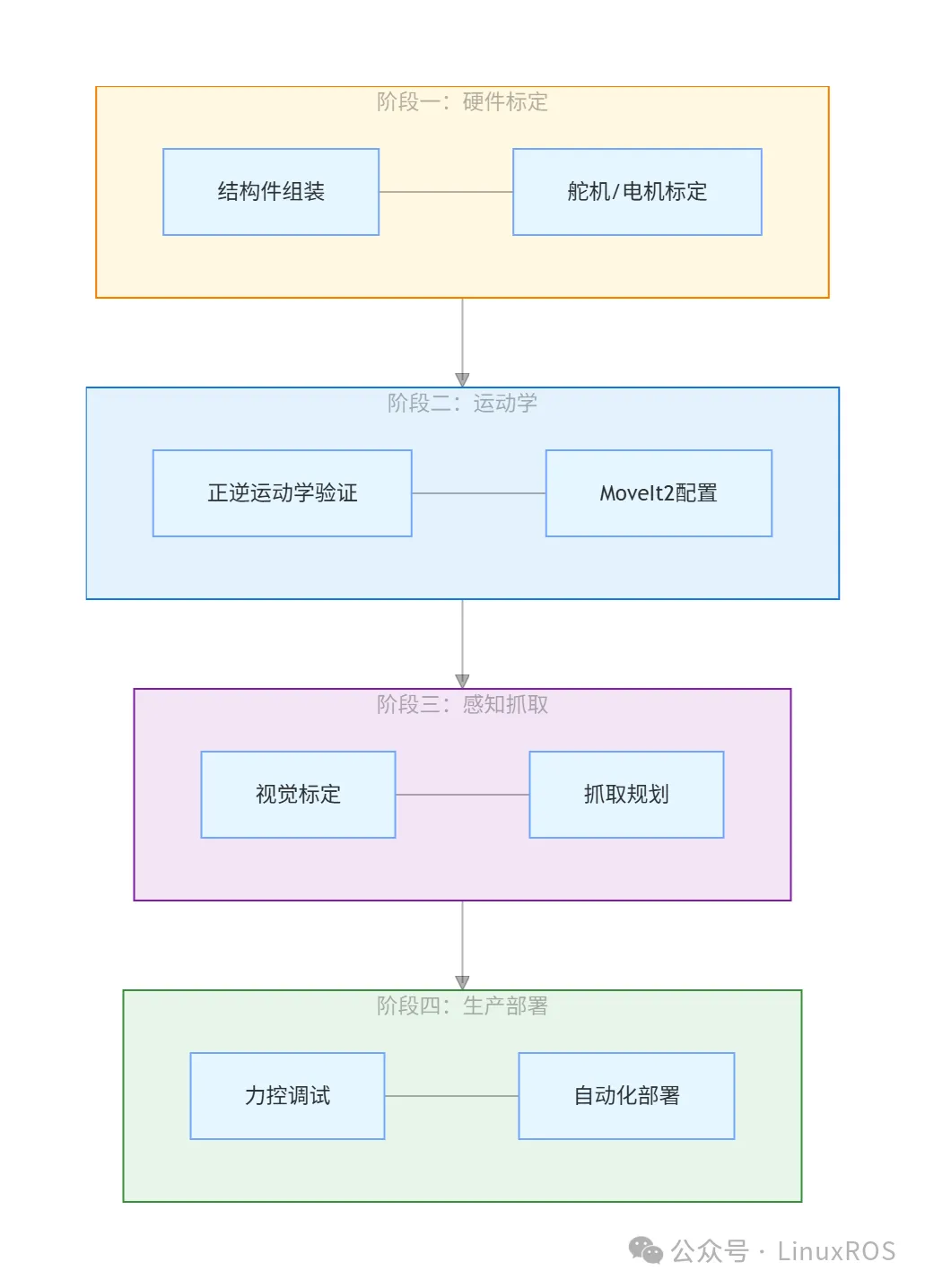
7.4 机械臂开发路线
八、选型建议
8.1 主控选型
| 类型 | 推荐芯片 | 算力 | 适用场景 |
|---|---|---|---|
| 人形入门 | Jetson Orin NX | 70 TOPS | 研究、原型 |
| 人形量产 | Jetson Thor | 1000+ TOPS(INT8) | 商业产品 |
| 四足入门 | Raspberry Pi 4B + Arduino | — | 教育、DIY |
| 四足科研 | Jetson Nano + STM32F4 | 1 TOPS | 步态、导航 |
| AGV入门 | RK3568、Jetson Nano | 1-6 TOPS | 教育、科研 |
| AGV工业 | RK3588、Jetson Orin | 10-40 TOPS | 物流、巡检 |
| 机械臂入门 | Arduino Mega + Teensy 4.1 | — | 教育、DIY |
| 机械臂工业 | RK3568 + OpenCR | 1-6 TOPS | 工业自动化 |
8.2 总结
| 需求 | 推荐架构 |
|---|---|
| 通用人形 | 人形 + VLA + WBC + EtherCAT |
| 教学四足 | Stanford Pupper + Pi + PS4手柄 |
| 科研四足 | Mini Pupper + ROS2 + SLAM |
| 物流搬运 | AGV + Navigation2 + 激光SLAM |
| 服务机器人 | AMR + 视觉语义 + 语音交互 |
| 桌面机械臂 | AR4 + ROS2 + MoveIt2 |
| 工业机械臂 | 机械臂 + ROS2 + ros2_control + 力控 |
做机器人,先定类型。人形重协调,四足重步态,AGV重导航,机械臂重轨迹。架构选对了,开发效率翻倍。
文章来源于公众号-LinuxROS,仅用于学习分享,如有侵权请私聊删除
版块:
机器人开源工坊
2026/06/05 10:24



全部评论