目之所及,科技所至:新2系示波器限量追光版重磅来袭
我们一直在创新前行 2系列示波器自面市以来,凭借卓越的技术性能和人性化设计赢得了业界的广泛赞誉。它不仅拥有高达500MHz的带宽和2.5GS/s的超高采样率,还提供了10Mpts超长记录长度,让每一次测量都精准无误。 创新不止步,美学同行 透明版的新2系列示波器将科技美学和实用功能完美结合,透明外壳让每一个电路和组件的运作都一目了然,提供了前所未有的交互体验,是每位工程师和科技爱好者的理想选择。 抢先体验,独家限量 5月8日,限量发售。 准备好抢先体验未来的测量技术了吗? // 立即扫码限时秒杀 限量宠粉价:¥????9
示波器
泰克科技 . 2024-04-23 1 1 945

智能割草机采用单轴陀螺仪XV7011BB,有效解决运行偏航、信号丢失问题
智能割草机作为现代家庭和商业草坪维护保养的重要工具,其精确的定位和导航系统对于提高机器工作效率和确保安全运行至关重要。在智能割草机的发展历程中,定位和导航技术一直是关键的创新点。 传统的基于RTK(实时动态差分定位技术)技术的割草机虽然在开阔地带表现出色,但在家庭花园等封闭或半封闭空间中,其性能受限于GPS信号的遮挡和干扰,导致定位不准确引起位置漂移,甚至频繁丢失信号。此外,RTK系统一般由基准站、数据链、流动站三部分组成,系统复杂、成本高昂、维护及校准数据门槛高等原因也限制了RTK系统智能割草机的普及。 针对这些挑战,EPSON单轴陀螺仪XV7011BB可为智能割草机的导航系统提供新的解决方案。该产品支持SPI / I2C 输出接口,16/24bit角速度输出;工作温度范围 -20 °C to +80 °C(选项:-40 °C to +85 °C),具有非常出色的零偏稳定性,内置温度传感器及可选择的数字滤波器,进一步确保信号的稳定输出;工作电压范围在2.7~3.6V之间,提供SPI / I2C输出接口,封装尺寸仅为5mm*3.2mm*1.3mm,方便控制系统集成。 详细规格参数见下图: 核心应用优势 ±100°/s的测量范围,满足精准的运行路径 相比于传统的RTK系统,XV7011BB单轴陀螺仪在封闭或半封闭空间中表现出更高的稳定性和准确性。其±100°/s的测量范围能够满足割草机在正常工作条件下可能遇到的各种角速度变化,而在16位分辨率下,能够检测到最小为0.00305°/s的角速度变化,在24位分辨率下更是降低至0.0000119°/s,保证了极高的测量精度。这意味着即使在树木繁茂或墙壁环绕的环境中,XV7011BB也能提供稳定的角速度数据,确保割草机的导航系统持续工作。 此外,在割草机应用中通过对角速度数据的实时分析,控制系统可以计算出机器的实际姿态和运动趋势。这包括检测旋转、侧倾、转弯或其他非直线运动。再结合其他传感器(如超声波、红外或摄像头)的数据,割草机的控制系统可以精确地调整方向和速度,以避免碰撞并继续沿着预定的路径割草,同时也为避障系统提供了必要的数据支持。 休眠电流低至3μA,助力设备长久续航 相对于RTK系统需要持续接收和处理复杂的GPS信号通常具有较高的功耗(工作态电流消耗在几百毫安左右),单轴陀螺仪XV7011BB的低功耗特性对于电池供电的割草机来说是一个显著优势。XV7011BB芯片由于不依赖外部信号,在非通信状态下典型电流消耗为0.9mA,待机电流仅为160μA,休眠电流更是低至3μA。在功耗和电流消耗方面,XV7011BB单轴陀螺仪明显优于RTK系统定位模块。这有助于延长割草机的工作时间,减少充电频率,提高用户的便利性。 0.003(°/s)/√Hz at 10Hz低噪声特性,减少运行误判 低噪声特性是陀螺仪性能的一个重要指标,噪声会导致陀螺仪输出的信号与实际角速度之间的误差,从而降低测量的精度。 对于消费级和工业级MEMS陀螺仪,噪声水平通常在以下范围内: 消费级陀螺仪:噪声水平可能在0.01(°/s)/√Hz到0.1(°/s)/√Hz之间,这些陀螺仪通常用于游戏控制器、智能手机和其他低成本应用。 工业级陀螺仪:噪声水平可能在0.01(°/s)/√Hz以下,这些陀螺仪适用于需要更高精度的工业和应用。 高精度陀螺仪:对于高精度应用,如惯性导航系统,噪声水平可能更低,甚至可以达到0.001(°/s)/√Hz或更低。 XV7011BB单轴陀螺仪的噪声参数为0.003(°/s)/√Hz at 10Hz,这个值在工业级和高精度应用中是比较低的。意味着XV7011BB单轴陀螺仪在这个频率下输出的角速度信号变化在0.003°/s的范围内,确保了陀螺仪输出的信号更加接近实际的角速度变化,可减少了因噪声引起的误判,提高了避障系统的准确性。 综上所述,EPSON单轴陀螺仪XV7011BB为智能割草机的导航系统带来了全新的改进,它不仅提高了割草机在复杂环境中的导航稳定性和精确性,还降低了系统的整体成本。随着智能割草机技术的不断进步,XV7011BB陀螺仪的应用可为用户带来更加智能、高效、经济的割草体验。
爱普生电子元器件官方 . 2024-04-22 630

惯性测量单元M-G370系列有高稳定性、高精度和小尺寸封装,广泛用于工业领域
爱普生现已推出型号为M-G370系列的高稳定性、高精度及极小尺寸封装的惯性测量单元(IMU),可广泛应用于工业系统的各个领域。 为了节省PCB的面积和产品空间,M-G370系列惯性测量单元设计精巧,且具有6个自由度:三轴角速率和三轴线性加速度,系统采用高精度补偿技术,提高了产品的稳定性和高精度测量能力。IMU内置存储单元用于保存各校准标定参数,这些参数在上电后可以自动提取应用到实际的测量中。 M-G370系列支持通用的SPI或者UART通讯,这些数字化的通讯便于系统设计,降低了工程师的应用门槛,易于上手、调试和应用。 产品基本特性参数 惯性测量单元M-G370系列采用单电源3.3V供电,工作电流的典型值为16mA, 可以在-40~85℃的温度范围内进行校准和持续工作,数据分辨率高达32位,数据输出可达2K Sps,支持外部触发输入和外部计数复位输入,6个自由度中三陀螺仪为±450 °/s,三加速度为±10 G,初始基准偏差360°/ h (1σ) / 2mG (1σ)。更多参数详见产品手册。 M-G370系列的功能框图及引脚示意如下图所示: 图一:功能框图 惯性测量单元与MCU的应用连接: 从如下图所示,通过UART接口或者SPI接口的简单连接,即可实现控制系统与惯性测量单元的数据通讯,实现系统配置、参数标定和检测结果的获取。图中的DRDY引脚为状态输出,可与单片机的中断输入连接,在IMU完成一轮数据检测时,可通过该引脚主动通知MCU检测完成,向MCU发送检测数据触发中断,避免了MCU的主动查询,节省了MCU的机器周期。 图二:应用连接框图 几点应用注意事项: 1. 通讯接口:可以采用SPI通讯或者UART通讯,但不要同时连接两种通讯,否则可能会导致工作异常。 2. 空引脚处理:对于那些在设计中没有用到的引脚,需要通过上拉电阻连接到VCC,不要直接悬空。 3. 复位引脚:如果设计中不需要对芯片做复位处理,该引脚也需要连接到VCC电源端。 4. 输入引脚:该器件中的所有输入引脚,IMU内部均有弱上拉电阻。 5. ESD保护:在存储及碰触该IMU时,注意做好ESD保护,ESD可能会使该器件性能衰减,部分异常甚至彻底损坏。 M-G370系列采用迷你设计,20针可插拔式接口,方便根据系统实际需求安装应用,如下图所示,该IMU的长*宽*高为24*24*10mm,重量仅为10克, 图三:外形尺寸及标示 基于以上优异的性能参数,惯性测量单元(IMU)M-G370系列可应用于诸如摄像头云台、导航、振动控制及稳定系统、定向跟踪系统等领域。爱普生惯性测量单元(IMU)有一系列的产品供选型应用,在实际应用中,如果你的产品设计需要更多的参数或精度要求,请与世强FAE联系取得相应的技术支持,相信该IMU系列产品中总有一款可以满足您的期待和产品设计。 更多资讯请关注公众号
爱普生电子元器件官方 . 2024-04-22 855

高精度三轴加速度计M-A352AD10实现更快更准的地震监测,可实现DC~460Hz的全频段监测
全球每年因地震而造成的经济损失高达358亿美元,并且有上升的趋势。面对如此天灾,我们可以利用现代化的技术和地震监测设备在地震活跃地区进行实时的动态监测,尽可能地提前发现即将到来的地震而发出避险警告,或者当地震发生后速度定位到震中位置尽早开展搜救。 图源数据 中国地震台网 地震监测设备如何快速监测到地震波的发生?如何快速地将地震信号传输到系统或设备上,让人快速做出相应对策?如何在恶劣的环境下,仍能保持稳定可靠的监测?其核心之一就是采用了传感器技术和相关设备,我们可以在地震易发生区域或重点观察的区域大规模部署小型传感器,结合物联网数字化技术集成到地震监测系统中,即可做到无需人工维护,长期连续地对相关区域进行监测。但在实际应用中,还是会存在不少问题。如:单体设备测量频率不够宽需要多种设备配合才能涵盖所需测量的所有频率范围、监测精度不足、无法很好地适应严苛的户外环境等。 为了解决这些问题,EPSON针对地震监测行业不断优化升级的高精度三轴加速度计M-A352AD10可以发挥较好的作用,该产品在日本气象厅认证的烈度计中已得到成功应用。下面让我们一起来看看EPSON最新的高精度三轴加速度计M-A352AD10如何对地震进行有效监测。 上图信息来源于日本EPSON官网 DC到460Hz超宽频率范围,准确监测所有震动 因为不同介质的影响,地震波会存在不同的频率,其分布范围从DC到400Hz均有存在。这就意味着要全面地监测,就必须要覆盖全频段。当然,通过多个监测单元,对不同频段进行独立监测的方式是可行的。但是,很多时候受限于部署环境,无法同时部署多个监测单元,这就会导致用户需要选择测量频率段,无法全面地监测所有震动情况。因此,如何通过单个传感器实现全频段地震监测,是一个需要解决的难题。 高精度三轴加速度计M-A352AD10利用数字传感器技术,通过内置可编程数字滤波器,可以精确地过滤出所需频率段的信号,从而不再需要多个不同频率段的监测单元,即可以实现从DC~460Hz的全频段监测,真的做到依靠单个传感器在任何环境条件下均可部署和全面监测,从而解决用户需要选择频率段的困扰。 与此同时,高精度三轴加速度计M-A352AD10宽达±15g的输出量程,即使是面对10级地震烈度的峰值加速度(约1g)也可以随时输出。而其抗干扰性能也令人印象深刻,低至0.2µG/√Hz的平均噪声密度性能,如按照6Hz频率点算,仅为不到1µG的噪声值,对测量结果影响几乎可以忽略不计,极大地提高测量精度,从而更全面地保障对所有震动的准确监测。 1000G的抗冲击能力,保持长期稳定运行 由于地震监测需要连续长期的测量,因此高可靠是其重要的考量因素之一。但因为现有的传统监测单元包含了很多机械结构部分,一旦设备处于震中受到直接冲击,很多时候都会被损坏。不仅带来了经济损失,而且也无法为后续余震和快速震源定位提供支持。 EPSON采用QMEMS技术设计,使得高精度三轴加速度计M-A352AD10内部设计极其紧密,无易损机械单元,让其拥有高达1000G的抗冲击能力,对比上一代产品的300G,参数有了大幅度的提升。即使面对速度高达7千米/秒的纵波直击时产生的瞬时700多G的加速度力也不会损坏,可以较好地应对长期户外部署监测的可靠性难题。 小尺寸轻量化,快速集成到系统中 以往的地震监测手段,大多依靠机械感知震动然后转化为电信号的方式来监测,而且对于不同方向上的感知还需要分别用不同的单元进行测量,这就使得监测设备整体非常大和臃肿,在实际部署中往往有很多限制,同时运维费用也很高。 基于这个问题,高精度三轴加速度计M-A352AD10有自己的解决思路。其利用半导体传感器技术,将原本复杂精细且不好维护的监测结构,转变为稳定高效的数字传感单元,可以实现在单个传感单元上同时对XYZ三轴的同步监测。M-A352AD10的整体尺寸为48x24x16mm大小,长宽尺寸还没有一张信用卡大,而且重量仅为25g。相较于以往的传统监测单元动辄数倍的体积和重量有了质的飞跃,真正做到了极致的轻量化,为产品集成更多功能提供了可能性,使得地震监测产品可以进一步优化产品结构。 更多资讯请关注爱普生公众号
爱普生电子元器件官方 . 2024-04-22 150

从芯来到“香山”,芯华章助力国产RISC-V生态做了哪些事?
4月18日,芯华章联合芯测、赛昉科技等7家公司举办联合技术论坛,吸引了来自阿里巴巴达摩院、新华三、寒武纪、芯来科技、华大半导体、蓝芯算力的几十位验证工程师参与。 在现场,我们的分享从 RISC-V架构的特点讲起,再到由此带来的验证挑战,以及针对这些挑战,芯华章验证工具做了哪些不一样的技术设计,获得了客户什么样的部署效果。 RISC-V生态:大家好才是真的好 2018年,ARM以“设计系统芯片之前需要考虑的五件事”为主题,从成本、生态系统、碎片化风险、安全性和设计保证方面指出RISC-V还有很多不足。 但6年过去,生态系统不断完善的RISC-V,因其开源、简洁、灵活等特性,采用率也正在快速增长,特别是在物联网、边缘计算和汽车电子等新兴领域。市场研究机构Semico Research预测,到2025年,RISC-V处理器核心将接近800亿个,成为X86、ARM之外的第三大架构生态。 作为一种新兴指令集,RISC-V的验证工作就尤为重要,因为比起成熟的架构,RISC-V充满了更多的开放性和不确定性。只有借助更充分、更完备的验证,才能保障基于RISC-V架构相关产品的稳定性,从而助力其获得大规模的商业部署。 特别是考虑到从架构到IP再到系统级应用,RISC-V都有自己区别于传统架构的独特挑战。我们认为其中有五个方面的内容比较典型,也是本次现场分享的重点: ◉ RISC-V 高性能处理器(CPU、GPU、AI等)的架构方案少、成熟度低,处理器设计团队需要在RISC-V芯片的应用场景上进行架构验证 ◉ CPU定制程度更高,实现碎片化,需要更强更完备的验证,比如既需要单指令运行合规性验证;又需要完备的多指令运行验证:发现Data forwarding、Dead Lock等深层次的逻辑实现错误;浮点单元、AI加速单元等用户实现模块的精度高,验证难度大 ◉ 从IP到SoC的实现过程需要大量的仿真和调试,高性能物理验证平台和高可调试的硬件仿真平台资源都不够用;PCIE/DDR/HBM等高性能外设需要系统级仿真验证方案 ◉ 更多软件生态需要移植到RISC-V处理器,但由此带来的bug是软件问题还是硬件问题?定位和调试困难,需要更强大的软件代码-硬件电路联合调试手段 ◉ 芯片的后端实现过程中,需要高效验证每个步骤变换的等价性 100亿颗RISC-V处理器一半来自中企 在验证领域,“初生牛犊”的芯华章,和“年轻的”RISC-V其实容易碰撞出更多火花。因为我们可以不受以前的技术包袱拖累,从底层架构创新做起,快速适应新的指令集扩展,同时提供灵活的脚本接口,允许工程师自定义验证环境,以适应不断变化的RISC-V生态系统。 在和国内领先的RISC-V处理器IP供应商芯来科技合作中,芯华章GalaxPSS智能验证工具,在多核CPU研发项目的cache一致性验证中就获得了客户的实名点赞。 其中一个关键,是芯华章基于自主研发,已经打造了成熟的多核一致性模型。 借助这一模型,GalaxPSS可以方便地生成大量针对Cache Coherency的C testcase。C case中,我们也进行了expected result的计算,可以将读出的数据与Expected data进行比对,并将比对结果打印成log,方便客户高效完成后续调试。 此外,GalaxSim通过对SystemVerilog和UVM标准的支持,能够为RISC-V CPU的研发提供仿真支持,同时其独有的Turbo模式更能成倍加速多核RV处理器的仿真验证效率。 目前,GalaxSim在多个客户测试用例上已经取得了2-3倍的仿真性能提升,大幅降低了仿真回归测试的时间,提升验证效率。 另一个不得不提的是“香山”项目。“香山”RISC-V,作为一个由中国科学院计算技术研究所孕育出的开源RISC-V处理器项目,在很多方面都极其有代表性。 比如高速子卡接口验证,以及通过高速PCIe接口将设计连接至真实的主机实现混合仿真,从而实现更好的软硬件协同验证等等。在这些方面,芯华章HuaPro P2E都发挥了很关键的作用。 因为不同于传统的原型验证或硬件仿真,HuaPro P2E基于统一的软件平台和统一硬件平台,实现了有效的创新双模工作形式: ◉ 硬件仿真模式下支持高达7千多个全信号互连,全信号不限深度的调试,以及各种虚拟验证方案 ◉ 在原型验证模式下,通过一键式原型验证流程可以大大缩短验证时间,在超大规模SOC设计可以实现高达10M的仿真速率,以满足软件开发调试需求,同时还有丰富的接口解决方案 不仅仅是这些,芯华章Fusion Debug还针对RISC-V处理器提供定制调试服务,包括: ◉ 为客户的RISC-V core定制Fusion Debug CPU core模型 ◉ 为客户的多核RISC-V CPU定制多核CPU模型 ◉ 为客户的软件调试工具定制“硬件仿真-软件运行联合调试方案“,支持硬件电路和C代码的联合调试 同时,在芯片后端实现过程中,芯华章的GalaxEC也能够高效地验证每个步骤变换的等价性,确保设计在整个实现过程中的一致性和正确性。 一枝独放不是春,百花齐放春满园。根据RISC-V基金会的数据,截至2022年底,全球RISC-V处理器的出货量已达到100亿颗,其中近一半来自中国。 随着RISC-V技术的不断成熟和应用领域的扩大,芯华章将继续推动EDA工具的发展,助力RISC-V产业迈向新的高度。
芯华章科技
芯华章科技 . 2024-04-22 1151
干货 | 米尔Remi Pi 实时系统与EtherCAT移植
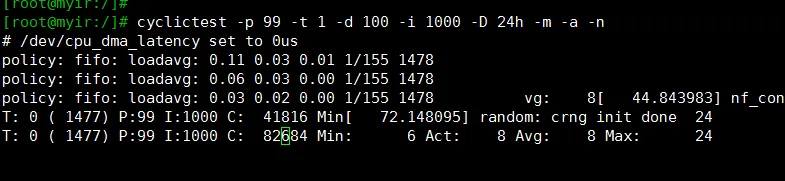
Remi Pi采用瑞萨RZ/G2L作为核心处理器,该处理器搭载双核Cortex-A55@1.2GHz+Cortex-M33@200MHz处理器,其内部集成高性能3D加速引擎Mail-G31 GPU(500MHz)和视频处理单元(支持H.264硬件编解码),16位的DDR4-1600 / DDR3L-1333内存控制器、千兆以太网控制器、USB、CAN、SD卡、MIPI-CSI等外设接口,在工业、医疗、电力等行业都得到广泛的应用。 在开发阶段,建议配合核心板配套的评估套件 MYD-YG2L23-8E1D-120-C-REMI来加速开发。评估套件的详细信息请访问:https://www.myir.cn/shows/23/14.html 实时内核设计 实时补丁我们选择RT-Preempt来实现 2.1. 移植补丁 RT补丁可以从RT官网下载5.10.83对应的补丁 https://cdn.kernel.org/pub/linux/kernel/projects/rt/5.10/older/ 把补丁放到自己的工作目录下,然后解压,如图2-1: hjx@myir-server:~/renesas/04_Sources$ tar -xvf patches-5.10.83-rt58.tar.gz 图2-1. 内核源码 进入到内核源码打补丁,如图2-2: hjx@myir-server:~/renesas/04_Sources/myir-renesas-linux$ for p in `ls -1 ../patches/*.patch`; do patch -p1 < $p; done 图2-2. 打实时补丁 编译内核源码 hjx@myir-server:~/renesas/04_Sources/myir-renesas-linux$ /opt/remi-sdk/environment-setup-aarch64-poky-linux hjx@myir-server:~/renesas/04_Sources/myir-renesas-linux$ make ARCH=arm64 mys_g2lx_defconfig hjx@myir-server:~/renesas/04_Sources/myir-renesas-linux$ make ARCH=arm64 Image dtbs -j16 更新编译得到的Image即可 2.2. 其他影响性能的配置 禁用CPU Freq自动调频,并设置主频为最高频率: cd /sys/devices/system/cpu/cpufreq/policy0 echo userspace > scaling_governor cat scaling_max_freq > scaling_setspeed (如不禁用cpufreq调频功能,系统会因动态调频产生极大的偶然延迟) 实时性测试 空载测试 cyclictest -p 99 -t 1 -d 100 -i 1000 -D 24h -m -a -n 图3-1.空载测试 CPU&内存满载 cyclictest -p 99 -t 1 -d 100 -i 1000 -D 24h -m -a -n 增加压力 stress-ng --cpu 4 --cpu-method all --io 4 --vm 50 -d 5 --fork 4 --timeout 36000s 图3-2.满载测试 数据对比: 板卡 MYD-YG2LX-REMI 测试时间 120min 指令 cyclictest &stress-ng 空载 平均 8us 最大 24us 满载 平均 13us 最大 136us 表3-1.数据信息 EtherCAT IGH移植 4.1. 下载EtherCAT IGH源码 到官网下载1.5版本的EtherCAT源码,如图4-1: https://gitlab.com/etherlab.org/ethercat/-/tree/stable-1.5?ref_type=heads 图4-1. 下载源码 解压EtherCAT源码 hjx@myir-server:~/renesas/04_Sources$ tar -xvf ethercat-stable-1.5.tar.bz2 hjx@myir-server:~/renesas/04_Sources$ cd ethercat-stable-1.5 加载sdk环境变量 hjx@myir-server:~/renesas/04_Sources/myir-renesas-linux$ source /opt/remi-sdk/environment-setup-aarch64-poky-linux 4.2. 编译EtherCAT源码 生成configure文件 hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ ./bootstrap + touch ChangeLog + mkdir -p m4 + autoreconf -i libtoolize: putting auxiliary files in AC_CONFIG_AUX_DIR, 'autoconf'. libtoolize: copying file 'autoconf/ltmain.sh' libtoolize: putting macros in AC_CONFIG_MACRO_DIRS, 'm4'. libtoolize: copying file 'm4/libtool.m4' libtoolize: copying file 'm4/ltoptions.m4' libtoolize: copying file 'm4/ltsugar.m4' libtoolize: copying file 'm4/ltversion.m4' libtoolize: copying file 'm4/lt~obsolete.m4' configure.ac:56: installing 'autoconf/ar-lib' configure.ac:55: installing 'autoconf/compile' configure.ac:58: installing 'autoconf/config.guess' configure.ac:58: installing 'autoconf/config.sub' configure.ac:42: installing 'autoconf/install-sh' configure.ac:42: installing 'autoconf/missing' examples/dc_user/Makefile.am: installing 'autoconf/depcomp' configure设置 hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ mkdir output hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ ./configure --prefix=/home/hjx/renesas/04_Sources/ethercat-stable-1.5/output --with-linux-dir=/home/hjx/renesas/04_Sources/myir-renesas-linux --enable-8139too=no --enable-generic=yes --host=aarch64-poky-linux (--prefix=/home/hjx/renesas/04_Sources/output 指定输出目录、--with-linux-dir=/home/hjx/renesas/04_Sources/myir-renesas-linux指定内核源码目录) configure: loading site script /opt/remi-sdk/site-config-aarch64-poky-linux checking for a BSD-compatible install... /usr/bin/install -c checking whether build environment is sane... yes checking for aarch64-poky-linux-strip... aarch64-poky-linux-strip checking for a thread-safe mkdir -p... /bin/mkdir -p checking for gawk... gawk checking whether make sets $(MAKE)... yes checking whether make supports nested variables... yes checking whether make supports nested variables... (cached) yes checking for a sed that does not truncate output... (cached) sed checking for aarch64-poky-linux-pkg-config... no checking for pkg-config... /opt/remi-sdk/sysroots/x86_64-pokysdk-linux/usr/bin/pkg-config checking pkg-config is at least version 0.9.0... yes checking whether make supports the include directive... yes (GNU style) .......... ............... config.status: creating examples/xenomai/Makefile config.status: creating examples/xenomai_posix/Makefile config.status: creating include/Makefile config.status: creating lib/Makefile config.status: creating lib/libethercat.pc config.status: creating master/Kbuild config.status: creating master/Makefile config.status: creating script/Makefile config.status: creating script/init.d/Makefile config.status: creating script/init.d/ethercat config.status: creating script/sysconfig/Makefile config.status: creating tool/Makefile config.status: creating tty/Kbuild config.status: creating tty/Makefile config.status: creating config.h config.status: executing depfiles commands config.status: executing libtool commands 编译源码 hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ make make all-recursive make[1]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' Making all in include make[2]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/include' make[2]: Nothing to be done for 'all'. make[2]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/include' Making all in script make[2]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script' Making all in init.d make[3]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script/init.d' make[3]: Nothing to be done for 'all'. make[3]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script/init.d' Making all in sysconfig make[3]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script/sysconfig' make[3]: Nothing to be done for 'all'. make[3]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script/sysconfig' ...... ...... make[3]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples/user' make[3]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples' make[3]: Nothing to be done for 'all-am'. make[3]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples' make[2]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples' make[2]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' make[2]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' make[1]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' 编译modules hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ make modules make[1]: Entering directory '/home/hjx/renesas/04_Sources/myir-renesas-linux' CC [M] /home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples/mini/mini.o LD [M] /home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples/mini/ec_mini.o CC [M] /home/hjx/renesas/04_Sources/ethercat-stable-1.5/master/cdev.o CC [M] /home/hjx/renesas/04_Sources/ethercat-stable-1.5/master/coe_emerg_ring.o CC [M] /home/hjx/renesas/04_Sources/ethercat-stable-1.5/master/datagram.o ........... ............ make[1]: Leaving directory '/home/hjx/renesas/04_Sources/myir-renesas-linux' 编译通过会对应生成ethercat-stable-1.5/devices/ec_generic.ko和ethercat-stable-1.5/master/ec_master.ko 4.3. 安装EtherCAT 安装成功后前面指定/home/hjx/renesas/04_Sources/ethercat-stable-1.5/output目录下有编译生成的各种用户空间的文件。 hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ make install Making install in include make[1]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/include' make[2]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/include' make[2]: Nothing to be done for 'install-exec-am'. /bin/mkdir -p '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/output/include' /usr/bin/install -c -m 644 ecrt.h ectty.h '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/output/include' make[2]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/include' make[1]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/include' Making install in script make[1]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script' Making install in init.d make[2]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script/init.d' make[3]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/script/init.d' make[3]: Nothing to be done for 'install-exec-am'. ........... .......... make[3]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples' make[2]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples' make[1]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5/examples' make[1]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' make[2]: Entering directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' make[2]: Nothing to be done for 'install-exec-am'. make[2]: Nothing to be done for 'install-data-am'. make[2]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' make[1]: Leaving directory '/home/hjx/renesas/04_Sources/ethercat-stable-1.5' 4.4. 将EtharCAT相关文件打包 在/home/hjx/renesas/04_Sources/ethercat-stable-1.5/output目录下创建modules文件夹,并复制ec_generic.ko和ec_master.ko到modules下 hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ mkdir -p output/modules hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ cp devices/ec_generic.ko output/modules/ hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ cp master/ec_master.ko output/modules/ hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ ls output bin etc include lib modules sbin share 压缩output输出文件 hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ tar -jcvf output.tar.bz2 output/ output/ output/etc/ output/etc/ethercat.conf output/etc/init.d/ output/etc/init.d/ethercat output/etc/sysconfig/ output/etc/sysconfig/ethercat output/sbin/ output/sbin/ethercatctl output/include/ output/include/ectty.h output/include/ecrt.h output/modules/ output/modules/ec_master.ko output/modules/ec_generic.ko output/share/ output/share/bash-completion/ output/share/bash-completion/completions/ output/share/bash-completion/completions/ethercat output/bin/ output/bin/ethercat output/lib/ output/lib/libethercat.so output/lib/pkgconfig/ output/lib/pkgconfig/libethercat.pc output/lib/libethercat.so.1.2.0 output/lib/cmake/ output/lib/cmake/ethercat/ output/lib/cmake/ethercat/ethercat-config.cmake output/lib/libethercat.a output/lib/libethercat.la output/lib/libethercat.so.1 hjx@myir-server:~/renesas/04_Sources/ethercat-stable-1.5$ ls output.tar.bz2 output.tar.bz2 至此IGH交叉编译完成,下面是在对应arm目标板上的操作。 4.5. 移植EtherCAT相关库到开发板 将上面制作好的output.tar.bz2传到开发板上,然后解压出来。 root@myir-remi-1g:~# tar -xvf output.tar.bz2 output/ output/etc/ output/etc/ethercat.conf output/etc/init.d/ output/etc/init.d/ethercat output/etc/sysconfig/ output/etc/sysconfig/ethercat output/sbin/ output/sbin/ethercatctl output/include/ output/include/ectty.h output/include/ecrt.h output/modules/ output/modules/ec_master.ko output/modules/ec_generic.ko output/share/ output/share/bash-completion/ output/share/bash-completion/completions/ output/share/bash-completion/completions/ethercat output/bin/ output/bin/ethercat output/lib/ output/lib/libethercat.so output/lib/pkgconfig/ output/lib/pkgconfig/libethercat.pc output/lib/libethercat.so.1.2.0 output/lib/cmake/ output/lib/cmake/ethercat/ output/lib/cmake/ethercat/ethercat-config.cmake output/lib/libethercat.a output/lib/libethercat.la output/lib/libethercat.so.1 将output目录下各文件目录的内容复制到板子根文件系统根目录下相应目录下,例如:cp bin/ethercat /bin/(include目录不用复制) root@myir-remi-1g:~/output# ls bin etc include lib modules sbin share root@myir-remi-1g:~/output# cp bin/ethercat /bin/ root@myir-remi-1g:~/output# cp etc/ethercat.conf /etc/ root@myir-remi-1g:~/output# cp etc/init.d/* /etc/init.d root@myir-remi-1g:~/output# cp -r etc/sysconfig/ /etc/ root@myir-remi-1g:~/output# cp lib/libethercat.* /lib64/ root@myir-remi-1g:~/output# cp -r lib/pkgconfig /lib64/ root@myir-remi-1g:~/output# cp modules/ec_master.ko /lib/modules/5.10.83-cip1-yocto-standard/ root@myir-remi-1g:~/output# cp sbin/ethercatctl /sbin/ 4.6. 启动EtherCAT 4.6.1. 配置主站的MAC地址 root@myir-remi-1g:~# depmod root@myir-remi-1g:~# modprobe ec_master main_devices=1E:ED:19:27:1A:B3 4.6.2. 启动EtherCAT root@myir-remi-1g:~# /etc/init.d/ethercat start Starting EtherCAT master 1.5.2 done 至此所有步骤完成。 米尔瑞米派 Remi Pi 瑞萨第一款MPU生态板卡,兼容树莓派扩展模块 采用瑞萨RZ/G2L工业级处理器,便于企业客户产品开发; Remi Pi兼容树莓派所有配件,方便产品原型搭建和创新应用; 更多的工业接口,兼顾开发、学习和实际应用; 软件系统丰富,支持Debian/Ubuntu/Linux等。 如需了解板卡,您可以通过访问以下米尔电子官网链接: https://www.myir.cn/shows/23/14.html 更多关于Remi Pi技术问题讨论请登录米尔官方论坛: https://bbs.myir-tech.com/forum-66-1.html 购买链接: https://detail.tmall.com/item.htm?id=763219500729&skuId=5425000934998
米尔
米尔 . 2024-04-22 3 1026

欧洲航天局利用MVG设备大幅增强新型Hertz 2.0测试设施灵活性
天线测量解决方案领导者Microwave Vision Group(MVG)近日宣布与欧洲航天局 (ESA) 签订两份合同,位于荷兰的欧洲航天研究和技术中心 (European Space Research and Technology Centre, ESTEC)将通过MVG天线测量技术为其新型改进射频测试设施Hertz 2.0提供补充。 Hertz 2.0将受益于大型多轴定位器,使中型和重型被测设备 (DUT) 能够在任何角度方向上进行高精度测试。MVG 与 DUT 定位器一起为紧缩场(CATR)馈源提供定位系统。 为了进一步提高 HERTZ 2.0 的测试能力,该机构还指定 MVG设计和制造大型平面近场 (PNF) 扫描仪,并提出了具有挑战性的要求——在不使用时将其隐藏在紧凑型范围系统后面。 HERTZ 2.0设施的尺寸将明显大于 HERTZ 1.0 ——长32m x 宽25m x 高18m,并将确保高精度的端到端天线和卫星测试频率范围很广——从 1 GHz 到几百 GHz。当代卫星中电子设备和天线系统的集成特性激发了这种扩展。 HERTZ 2.0 将容纳一个紧凑的远场测试范围以及一个平面近场扫描仪;二合一测试室可容纳目前正在开发的最大卫星及其复杂的射频有效载荷和通信系统的测试。 暗室中的另一个二合一选项与DUT定位系统有关。该安装将允许切换两个先进的 MVG 定位子系统:一个带有翻转升降 (AZ/EL) 定位器的重型塔,负载能力高达6000公斤,将允许测试完整的卫星有效载荷和非常重的天线;一个更适合轻型DUT定位要求的中型系统,将由塔式和辊式定位器组成。 新型馈源定位器除了能够将馈源喇叭精确定位在双反射镜紧凑型范围系统的焦点之外,还具有在焦平面中扫描馈源并在静区(QZ)中将平面波传播方向移动几度的能力。 平面近场扫描仪对于精确表征至关重要的高性能高频天线特别有用。在这种情况下,为了验证太空中的全部功能,卫星有效载荷和天线系统将在专用吸波测试暗室的受控环境中进行测试。使用近场平面扫描仪的测试配置还将避免大型DUT的移动,从而优化测量效率和精度。 借助MVG 提供的解决方案,可以根据DUT的机械特性调整定位器,并在紧缩场(CATR)和平面近场(PNF)之间选择最合适的天线测量技术,从而针对特定测量活动重新配置测试设施。该测试设施还将配备 MVG 最先进的WaveStudio天线测量软件,该软件将允许数据采集、可视化和后处理,从而进一步提高测试效率。 MVG 提供的最先进的定位器和平面近场(PNF)扫描仪将在增强 欧洲航天研究和技术中心设施的测试能力方面发挥重要作用。 Hertz 2.0 注定要在电磁测试和测量方面实现无与伦比的准确性和效率,并推动欧洲卫星开发和空间应用的创新和进步。
MVG
MVG . 2024-04-22 841

动中通天线选用M-G370PDG惯性测量单元,可实时监测天线的姿态和位置变化
动中通天线系统通常包括天线、卫星信号跟踪器、调制解调器、电源管理单元和用户终端设备等部分。其中,天线是系统的关键部件,负责接收和发送卫星信号。随着移动载体的运动,天线需要实时调整方向,以保持与卫星的稳定连接。卫星信号跟踪器负责监测卫星信号的变化,并根据载体的动态调整天线指向,确保信号传输的连续性和稳定性。 动中通天线在家庭和商业领域中得到了广泛的应用,但在实际应用过程中,天线系统面临诸多挑战,如载体移动过程中容易受到震动和颠簸的影响,导致信号传输不稳定,甚至出现信号中断的情况。此外,天线的指向精度也会受到载体移动速度和路径的影响,需要人工频繁调整天线指向以保持信号的稳定。 为了解决动中通天线在移动过程中的稳定性问题,就需要一种能够实时监测天线姿态和位置变化的传感器。同时,由于天线系统的复杂性,还需要考虑传感器与天线系统的集成难度和成本。 产品参数列表 针对动中通天线的上述应用难题,EPSON推出的M-G370PDG惯性测量单元(IMU)可以较好地解决,且能给客户带来更加高效可靠的解决方案。M-G370PDG 惯性测量单元采用高精度的三轴加速度计和陀螺仪,能够实时监测天线的姿态和位置变化,并通过内置的处理器计算出天线的姿态和位置信息。优势在于其具有的高精度和稳定性,能够满足动中通天线对姿态和位置监测的严格要求。此外,M-G370PDG 惯性测量单元的体积小巧,便于集成到天线系统中,并且具有较低的功耗,可以长时间稳定工作。 具体应用优势如下: 高精度与稳定性,减少人工操作 M-G370PDG惯性测量单元采用高精度的三轴加速度计和陀螺仪,能够实时监测天线的姿态和位置变化,并根据需要调整天线指向,以保持信号的稳定。例如在16位分辨率下,能够检测到最小为0.015°/s的角速度变化,在24位分辨率下更是降低至0.005°/s,这种高精度特性可以让动中通天线在运行过程中时刻保持较高的信号传输、减少了故障和中断的风险。而传统机械传感器精度较低,容易受到震动和颠簸的影响。这不仅提高动中通天线的稳定性和精确性,还降低了人工调整天线指向的频率,降低信号故障或中断的风险,极大地提高了工作效率和运行维护成本。 小巧易集成,低功耗延长设备运行时间 M-G370PDG 惯性测量单元的体积小巧,尺寸仅为5mm3.2mm1.3mm,便于集成到天线系统中。传统机械传感器体积较大,需要额外安装和调整,增加了系统的复杂性。工作电压范围为2.7V至3.6V,兼容多种供电系统,为天线系统提供了稳定的电源保障。在非通信状态下,典型电流消耗为0.9mA,待机电流仅为160μA,休眠电流更是低至3μA,有助于延长天线系统的工作时间,降低运行成本。而传统机械传感器功耗较高,容易影响天线系统的稳定运行。 抗干扰能力强,适用范围广 M-G370PDG 惯性测量单元内置可选择数字滤波器,能够抵抗来自其他电子设备的干扰。在实际应用中,即使在电磁干扰较多的环境中,传感器也能保持准确的姿态和位置测量,确保天线系统的稳定性。而传统机械传感器抗干扰能力较弱,容易受到外界环境的影响。M-G370PDG惯性测量单元适用于各种环境,包括室内、室外、阴雨天气等。而传统机械传感器在恶劣天气条件下性能较差,不适用于户外应用。 综上所述,M-G370PDG惯性测量单元在动中通天线应用中具有明显的优势。它体积小巧,便于集成;具有高精度和稳定性;功耗较低,延长了天线系统的工作时间;抗干扰能力强,适用于各种环境。 关注爱普生电子元器件公众号,获得更多资讯
爱普生电子元器件官方 . 2024-04-22 170
XV7011BB陀螺仪传感器具有出色的零偏稳定性、数字信号,可广泛用于工业场景
陀螺仪传感器作为一种重要的惯性传感器,在航空航天、智能手机与可穿戴设备、工业控制与机器人、汽车行业、医疗仪器等多个领域都有着重要的应用,为这些领域的发展和创新提供了关键支持。 Epson陀螺仪传感器系列以其优异的性能和可靠性著称,新推出的XV7011BB陀螺仪传感器是一种角速度传感器,作为一种石英电子式陀螺仪芯片,具有低功耗、小尺寸和灵活等特点。传感器具有SPI / I2C输出接口,提供高精度的角速度输出(16/24位),以及非常出色的温度零偏稳定性,适用于广泛的工作温度范围(-20°C至+80°C,可选至-40°C至+85°C)。 良好的温漂性能(±1°/s),极大改善了离差 XV7011BB陀螺仪是一种结合了MEMS技术和石英技术的陀螺仪传感器,由爱普生公司专利技术研发,通过将石英置于交流变电场中,当交流变电电场与石英的自然频率匹配时,会产生谐振现象。 传统的MEMS陀螺仪在输出角速度后,需要进行积分才能获取到角度信息。然而,即使在零输入状态下,由于受到温度等因素的影响,传统陀螺仪也会存在一定的输出,这些输出导致在积分过程中会引入累积误差,随着积分时间的增长,误差也会逐渐累积增大。 XV7011BB陀螺仪传感器将石英晶体的温度稳定性与MEMS技术相结合,具有非常优秀的温漂性能(±1°/s),从而大幅改善了误差,实现了在静止状态下仍能保持稳定的角速度输出。优异的温漂性能使得XV7011BB陀螺仪在惯性导航、姿态控制等应用中表现出色。 项目 符号 规格说明 条件 电源电压 VDDM 2.7 to 3.6 V 接口电源电压 VDDI 1.65 V to 3.60 V 温度范围 储存温度 TSTG -40°C to +85°C 工作温度 TOPR -20°C to +80°C 选项:-40°C to +85°C 敏感性 So 280LSB/(°/s) ±5 % 16bit, Ta=+25 °C 71680LSB/(°/s) ±5 % 24bit, Ta=+25 °C 静止的时输出 ZRL ±1 °/s (0 LSB Typ.) Ta=+25 °C 静止的时输出温度特征 ZRLt ±1 °/s Ta = 25°C的变化 检测范围 I ±100°/s 直线性 NI ±0.5 %FS Ta=+25°C 交叉轴 CS ±5 % Ta=+25°C 电流消耗 Iop1 0.9 mA Typ. 和非通信时 待机电流 Iop2 160 µA Typ. 休眠电流 Iop3 3 µA Typ. 噪音 Nd 0.003(°/s)/√Hz at 10 Hz XV7011BB陀螺仪传感器的规格特征 精准的单轴数字输出,满足高要求数据场景 XV7011BB陀螺仪传感器具有SPI / I2C输出接口,提供高精度的角速度输出(16/24位),具有更强的兼容性,为各种应用提供了可靠的数据传输和精准的角速度信息。SPI和I2C是常见的数字接口标准,可与微控制器或其他设备进行通信。传感器通过这些接口提供16位或24位的角速度输出,可以满足对数据精度和准确性要求较高的应用场景。 这种高精度的角速度输出能够帮助用户实现更精准的姿态控制、运动检测、导航定位等功能,提升设备或系统的性能和稳定性。 项目 XV7011BB XV7001BB 角速率输出 16/24位 16位 温度偏差 ±1°/s ±5°/s XV7011BB与XV7001BB陀螺仪传感器的差异比对 应用领域广泛 XV7011BB陀螺仪专为工业应用而设计,在工业领域的抗震和姿态控制方面应用广泛。通过陀螺仪传感器的高精度角速度输出和稳定性,工业设备可以实现更精确的姿态控制,提高生产效率和质量。例如,在机械制造中,陀螺仪可用于控制机器人臂的姿态,确保精准的加工和装配;在航空航天领域,陀螺仪可用于飞行器的姿态控制,提高飞行安全性和稳定性。 XV7011BB陀螺仪在人机接口的运动检测中起着关键作用。通过陀螺仪传感器检测设备的运动和姿态变化,可以实现更加智能化的人机交互体验。例如,在虚拟现实(VR)和增强现实(AR)设备中,陀螺仪可用于跟踪用户头部的运动,实现更沉浸式的虚拟体验;在智能手机和智能手环中,陀螺仪可用于识别用户手势操作,提高用户交互的便利性和体验流畅度。 随着人工智能、物联网等新兴技术的快速发展,陀螺仪传感器的市场需求也将不断增长。作为一种关键的感应器件,EPSON XV7011BB陀螺仪传感器系列不仅在技术水平上处于领先地位,而且在各行业的广泛应用中展现出了卓越的性能和稳定性。 关注爱普生公众号
爱普生电子元器件官方 . 2024-04-22 160

传Arm中国前执行长吴雄昂创立新公司,不少Arm前员工加入
4月22日消息,Arm 中国前执行长吴雄昂成立新公司,试图卷土重来,这次瞄准领域是以前的竞争架构「RISC-V」,据悉已有不少 Arm 前员工进入该公司。 资料显示,「众智齐芯(上海)科技有限公司」开发基于 RISC-V 指令集架构的芯片,背后推手是 Arm 中国前执行长吴雄昂,很可能挑战 Arm 和 Arm 中国。 产业人士透露,这间公司一直在招募 RISC-V 人才,另有传闻称,该公司可能成为 Tenstorrent 的中国代理。 目前有关「众智齐芯」的信息还很少,猜测这边说的芯片很可能是指设计 RISC-V 处理器 IP 和计算平台解决方案的实体,而非微控制器单元。 Arm 中国前执行长吴雄昂(Allen Wu)先前遭到 Arm 指控,涉及利益冲突又散布假消息,还在员工中制造恐慌和困扰,最终被 Arm 中国投票给解雇,但因为吴雄昂拒绝辞职,并宣称握有公司主控权,一度陷入夺权风波,所幸到 2022 年已经解决。 Tenstorrent 主要开发基于 RISC-V 架构的下一代顶尖 AI 芯片,其执行长 Jim Keller 在业界被誉为传奇工程师,如果众智齐芯成为 Tenstorrent 的中国代理,后者将是强大的合作伙伴。也因此,「众智齐芯」的任务可能是吸引客户,了解其需求,再利用 Tenstorrent 技术完成业务,推测「众智齐芯」更可能是合约芯片设计公司,或是一个定制芯片开发商。 据报导,「众智齐芯」成立于 2023 年 9 月 11 日,是间专注于 RISC-V 处理器 IP 和运算平台方案的科技创新企业,拥有产业顶级的 IP 技术开发和商业化经验,并将在各个关键市场与细分领域龙头展开合作,打造开源时代的新处理器 IP 生态。
快讯Arm
芯查查资讯 . 2024-04-22 2 9 1621

中科曙光80岁董事长被立案
4月19日晚间,中科曙光发布关于公司董事收到立案告知书的公告。公告称,中科曙光董事长李国杰于2024年4月19日收到《中国证券监督管理委员会立案告知书》(编号:证监立案字0012024004号),因其涉嫌短线交易中科曙光股票,根据相关法律法规,决定对其立案。截至4月19日收盘,中科曙光股价报44.67元/股,跌幅4.45%。 针对董事长被立案调查,中科曙光称本次事项系对李国杰个人的调查,不会对公司董事会运作及公司日常经营活动产生重大影响,李国杰将积极配合中国证监会的调查工作。公司将持续关注上述事项的进展情况,并按照有关法律、法规的规定履行信息披露义务。 董事长配偶短线交易获利50万元 4月11日,上交所向中科曙光下发监管工作函,就公司董事亲属短线交易事项明确监管要求。 据中科曙光4月12日披露的《关于董事亲属短线交易及致歉的公告》显示,李国杰的配偶张蒂华于2023年3月3日至2024年3月14日期间通过集中竞价交易方式买卖该公司股票。上述交易周期内,张蒂华累计买入中科曙光股票3343296股(141笔),累计成交金额合计约153669067.94元;累计卖出公司股票3342596股(91笔),累计成交金额合计约154417295.06元;扣除交易佣金、印花税等税费后累计收益589779.30元。截至4月12日,张蒂华尚持有该公司股票700股。 根据《证券法》第四十四条的规定:“上市公司、股票在国务院批准的其他全国性证券交易场所交易的公司持有百分之五以上股份的股东、董事、监事、高级管理人员,将其持有的该公司的股票或者其他具有股权性质的证券在买入后六个月内卖出,或者在卖出后六个月内又买入,由此所得收益归该公司所有”。“前款所称董事、监事、高级管理人员、自然人股东持有的股票或者其他具有股权性质的证券,包括其配偶、父母、子女持有的及利用他人账户持有的股票或者其他具有股权性质的证券”。 中科曙光表示,按照规定,张蒂华上述交易构成短线交易,所获收益及后续收益应归公司所有。截至本公告披露日,张蒂华已将本次短线交易所得收益58.98万元全额上交至公司。 中科曙光称,张蒂华未能正确理解短线交易的相关法律、法规规定,不存在主观故意违规情况。其交易期间未征询李国杰意见,亦未告知上述交易行为,系个人根据证券市场已公开的信息并基于个人判断而独立作出的投资行为,李国杰不知悉其证券账户交易情况,不存在因获悉内幕信息而交易公司股票的情形,亦不存在利用内幕信息谋求利益的目的。 中科曙光最后称,张蒂华女士已认识到本次违规交易的严重性,对因本次短线交易行为给市场和投资者带来的不良影响向广大投资者致以诚挚的歉意。李国杰先生对于未能对其亲属及时尽到督促义务、未能及时发现其亲属买卖公司股票深表自责。李国杰先生、张蒂华女士承诺将严格遵守相关法律法规规定。 中科曙光称,公司将以该事件为鉴,要求持股5%以上股东、董事、监事、高级管理人员学习《证券法》《上海证券交易所股票上市规则》《上海证券交易所上市公司自律监管指引第1号——规范运作》等相关法律法规、规范性文件,并将进一步督导全体董事、监事、高级管理人员强化对亲属行为的监督管理,严格遵守相关规定,避免此类事项再次发生。
中科曙光
芯查查资讯 . 2024-04-22 1 5 2120
深度 | 汽车以太网为什么重要?物理层芯片有哪些厂商?
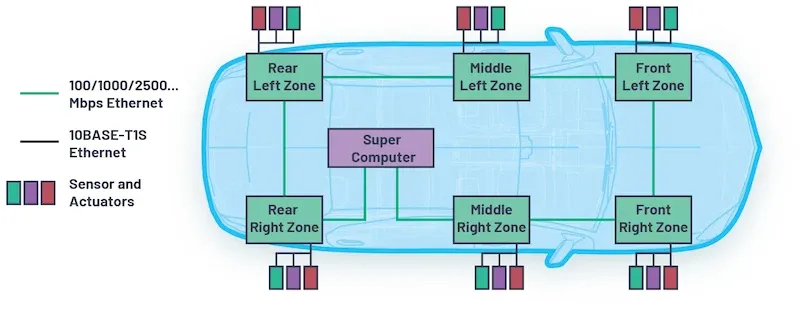
重点内容速览: | 以太网是汽车升级到Zonal架构的关键 | 汽车以太网标准的演进带动物理层芯片使用数量 | 汽车以太网物理层芯片的厂商格局 传统汽车内部通信协议CAN/CAN-FD/CAN-XL/LIN等成熟且成本低,还将在要求不高的设计中被采用,然而,汽车智能化趋势下,汽车以太网(Ethernet)被认为是未来汽车通信架构的首选。 图注:汽车以太网与其他汽车内部通信协议的对比 汽车以太网之所以受到重视,与汽车智能化和自动驾驶技术息息相关。根据芯查查收录报告显示,中国无人驾驶市场以其惊人的年复合增长率接近 30%,在全球无人驾驶技 术发展中占据重要地位。 图注:自动驾驶市场预测(来源于芯查查-报告,更多报告登录网址查看:https://www.xcc.com/news/report) 在这个趋势之下,汽车OEM不仅要开发新的汽车功能,同时保持较低的系统复杂性,因此OEM正在转向新的汽车电子架构,这些架构都依赖于以太网在汽车中的广泛部署,其中一个常被提及的新架构是Zonal。 以太网是汽车升级到Zonal架构的关键 与按功能对汽车器件进行划分的域结构不同,Zonal架构按物理位置对汽车器件进行分组,显著降低系统复杂性。通过对器件进行空间分组,汽车OEM可以减少汽车中ECU和线束布线的数量。 图注:汽车Zonal架构(图源:ADI) Zonal模块通过边缘节点通信网络从各种传感器和ECU传输数据,并通过骨干通信将组合的传感器数据转发到中央计算系统,同时,还将中央计算系统接收的数据传输到各种执行器。中央计算系统和Zonal模块之间的这种双向通信,需要高带宽和低延迟的通信骨干网,处理由多个高级驾驶辅助系统(ADAS)摄像头、汽车运动控制等功能生成的大量数据。 业界普遍认为,以太网是Zonal架构成功的关键,作为一种久经考验的技术,以太网支持可扩展性、多种速度等级和基于服务的架构,还提供完全开发的安全建块。此外,以太网具有定义明确且易于理解的开放系统互连(OSI)模型,可以更轻松地管理汽车网络中的复杂性。 汽车以太网标准的演进带动物理层芯片使用数量 在汽车应用场景中,单双绞线以太网支持10Mbps到10Gbps速度,可以在最远15米距离内通信,足以覆盖汽车中最长的链路。 虽然以太网能够实现极快速度,但这种速度并非在所有情况下都是必需的。例如,车门控制模块或供暖、通风和空调系统通信不需要100Mbps的数据速率;高速率的标准则适用于汇聚摄像头和自动驾驶传感器数据从Zonal模块发送到中央计算系统。此外,10Mbps以太网,甚至是传统的控制器局域网(CAN)等替代网络协议更适合低速和带宽密集度较低的用例。 图注:汽车以太网端口数量将超过100个,将带动物理层芯片使用量。(图源:Ethernet Alliance) 对于先进的汽车智能化功能,还是需要高级的汽车以太网标准,包括100/1000/2500Mbps BASE-T1标准和10BASE-T1S。随着标准向更高级别演进,端口的数量随之增加,以太网联盟Ethernet Alliance预测,未来智能汽车单车以太网端口将超过100个,中国汽车以太网物理层芯片量超过2.9亿片,因为每一个传感器(包括摄像头、激光雷达、毫米波雷达、超声波雷达等)侧都需要部署一个物理层芯片,以连接到ADAS域的交换机上,交换机节点也需要配置若干个物理层芯片。 汽车以太网物理层芯片的厂商格局 汽车以太网电路接口主要由数据链路层(MAC)和物理层(PHY)两部分构成,并且是市场规模或销售额较大的细分领域。设计方案的一个趋势是,目前汽车大部分处理器已包含MAC控制,而以太网物理层芯片作为独立的芯片,用于提供以太网的接入通道,起到连接处理器与通信介质的作用。 就汽车以太网物理层芯片的厂商格局来看,市场份额是海外厂商占大多数,这些厂商拥有突出研发实力和规模化运营能力,并呈现高度集中的市场竞争格局,比较有代表性的为博通、美满电子和瑞昱3家厂商,均属于集成电路设计国际领先企业,资金雄厚、技术领先、客户资源和品牌优势明显,影响着以太网物理层芯片行业的发展方向,市场地位突出。 图注:2020年汽车以太网物理层芯片市场格局(来源:中国汽车技术研究中心有限公司) 国内做汽车以太网物理层芯片的厂商主要是景略半导体和裕太微。景略半导体成立于2009年,总部位于中国上海,景略半导体自2018年战略重组后专注研发以太网通信芯片,开发了高速物理层接口技术,可以满足新一代汽车以太网、工业互联网、企业和数据中心对数据带宽和链接节点数的高速成长需求。 裕太微则是少数实现千兆高端以太网物理层芯片大规模销售的企业,凭借强大的研发设计能力、可靠的产品质量和优质的客户服务,公司产品已成功进入普联、盛科通信、新华三、海康威视等国内众多知名企业的供应链体系,打入被国际巨头长期主导的市场。 图注:汽车千兆以太网物理层芯片的对比(来源:裕太微招股书) 小结 汽车电气化、智能化和网联化推动汽车内部数据传输需求的爆炸性增长,汽车以太网由最初的百兆级别向千兆级别演进,例如支持1000BASE-T1标准的芯片,以满足ADAS、自动驾驶和车载信息娱乐系统等应用的高带宽需求,由此也推动了汽车以太网物理层芯片市场规模不断扩大。 市场中既有国际领先的半导体厂商,比如NXP、德州仪器、英飞凌、Marvell等,也有像景略半导体、裕太微等国内企业积极参与竞争,推出符合车规的汽车以太网物理层芯片产品。随着智能驾驶技术的深入发展,汽车以太网物理层芯片将迎来更广阔的市场空间。
汽车电子
芯查查资讯 . 2024-04-22 5 14 2015
市场周讯 | 美光将获得美国政府逾60亿美元补助;ASML一季度净利润同比降38%;海能达恢复销售对讲机产品
| 政策速览 1. 欧盟委员会:4月20日消息,欧盟委员会将批准苹果公司开放点击支付(Tap to Pay)选项。在欧洲市场,银行和第三方支付应用将不需要使用Wallet应用或者Apple Pay,直接通过NFC在iPhone上实现非接触式支付。 2. 工信部:4月17日,工信部发布《工业和信息化部办公厅关于开展第六批专精特新“小巨人”企业培育和第三批专精特新“小巨人”企业复核工作的通知》。通知指出,企业需如实、自主填报,不得借助第三方机构申请。 3. 商务部:4月19日消息,商务部、外交部、国家发展改革委、科技部、工业和信息化部等十部门联合印发《关于进一步支持境外机构投资境内科技型企业的若干政策措施》,提出优化管理服务、加大融资支持、加强交流合作、完善退出机制4方面16条具体措施。 4. 中央网信办:4月19日,中央网信办等三部门印发《深入推进IPv6规模部署和应用2024年工作安排》。通知指出,以全面推进IPv6技术创新与融合应用为主线,着力破解瓶颈短板,完善技术产业生态,打造创新引领、高效协同的自驱性发展态势。 | 市场动态 5. 国家统计局:根据国家统计局4月16日公布的数据显示,仅今年3月份,全国集成电路产量就增长了28.4%,达到362亿颗,创历史新高。 6. 日本财务省:日本财务省4月17日公布统计数据显示,因汽车以及半导体等电子零部件出口增长,带动了日本今年3月份出口额同比增长7.3%至94,696亿日元,连续第4个月呈现增长,创下历史新高,并实现3,665亿日元贸易顺差额。 7. TechInsights:The McClean Report 4月份的更新全球Top 25半导体供应商的最终排名,Top 25供应商排名中没有新的上榜企业,但排名发生了明显变化。Top 25中有13家供应商的总部设在美国;欧洲、中国台湾和日本各有三家;韩国有两家;中国大陆有一家。Top 25的名单包括代工厂,因为它旨在比较最大的半导体公司的年销售额,而不是市场份额排名。 8. IDC:2023全年中国液冷服务器市场规模达到15.5亿美元,与2022年相比增长52.6%,其中95%以上均采用冷板式液冷解决方案。IDC预计,2023-2028年,中国液冷服务器市场年复合增长率将达到45.8%,2028年市场规模将达到102亿美元。 9. TrendForce:NVIDIA GB200的前一代为GH200,皆为CPU+GPU方案,主要搭载NVIDIA Grace CPU及H200 GPU,但以GH200而言,出货量估仅占整体NVIDIA高端GPU约5%。目前供应链对NVIDIA GB200寄予厚望,预估2025年出货量有机会突破百万颗,占NVIDIA高端GPU近4~5成。NVIDIA虽计划在今年下半年推出GB200及B100等产品,但上游晶圆封装方面须进一步采用更复杂高精度需求的CoWoS-L技术,验证测试过程将较为耗时。 10. Counterpoint Research:设计外包成为主流,驱动 ODM/IDH 出货量份额攀升。2023 年全球智能手机市场整体出货量下降了 4%,但由于许多品牌选择将智能手机设计和制造外包给ODM厂商以在竞争激烈的市场中保持竞争力,因此2023 年,ODM/IDH 对整体智能手机出货量的贡献同比微增达历史最高水平,这显示出外包业务的增长。三星、小米、荣耀、OPPO、vivo 等品牌正将部分产品线外包给 ODM/IDH 厂商。 11. Canalys:2024年第一季度全球智能手机出货量同比增长11%。在Galaxy AI的积极推动下,三星以20%的市场份额重归榜首。苹果位居第二,市场份额为16%,在其战略重点市场上面临挑战。由于小米新品走量机型红米A3的竞争优势,其以14%的市场份额位居第三。传音以10%的市场份额位居第四,OPPO以8%的市场份额位居前五。 12. Omdia:到 2024 年底,GenAI 在亚洲和大洋洲地区的软件收入估计约为 34 亿美元,但预计到 2028 年将超过 180 亿美元。在 GenAI 的开发方面,相比于其他市场,中国、日本和韩国最为突出。这三个市场的供应商总共开发了 300 多个基础模型,覆盖各种应用,包括聊天机器人和虚拟助手、视频分析、游戏和软件开发、自动驾驶汽车和机器人等等。 | 上游厂商动态 13. 瑞萨电子:4月15日消息,瑞萨电子宣布,考虑到EV(电动汽车)需求不断增长,为扩大功率半导体产能,重启甲府工厂(山梨县甲斐市),并为庆祝该工厂重启举行了开业仪式。 14. Microchip:4月16日消息,Microchip宣布收购 Neuronix AI Labs,以进一步增强在现场可编程门阵列(FPGA)上部署高能效人工智能边缘解决方案的能力。Neuronix AI Labs提供神经网络稀疏性优化技术,可在保持高精度的同时,降低图像分类、目标检测和语义分割等任务的功耗、尺寸和计算量。 15. 铠侠:4月16日消息,因半导体市况复苏,铠侠计划重启上市手续,目标最快在2024年内于东京证券交易所IPO上市。铠侠大股东、美国投资基金贝恩资本(Bain Capital)已在4月15日向铠侠往来银行告知上述IPO计划,除了将发行新股外,贝恩资本也计划出售部分持股。 16. AMD:4月16日,AMD宣布推出两款新产品锐龙(Ryzen)Pro 8040系列和AMD锐龙Pro 8000系列,扩展其商用移动和桌面AI个人电脑(PC)产品组合。 17. ASML:4月17日,荷兰光刻机公司阿斯麦(ASML)发布2024年第一季度财报,净销售额53亿欧元,同比下降21%;净利润达12亿欧元,同比下降38%。公司产品及服务总毛利率为51%,第一季度新增订单金额为36亿欧元,其中6.56亿欧元为EUV光刻机订单。 18. 海能达:4月17日,海能达通信股份有限公司发布重大诉讼的进展公告称,美国上诉法院决定暂停执行一审法院对公司颁布的产品禁售令及罚款等。此举意味着海能达恢复销售对讲机产品。 19. 三星电子:4月16日消息,美国政府将向三星电子拨款最高64亿美元,三星电子将会在德克萨斯州奥斯汀郊外的泰勒的投资增加一倍多,提高到约450亿美元,以用于增加第二家芯片制造厂、先进的芯片封装设施和研发能力。 20. 台积电:4月18日,台积电正式公布了2024年第一季度财务报告,该季合并营收约新台币5,926.4亿元,同比增长12.9%,环比下滑3.8%。税后净利润约新台币2,254.9亿元,同比增长8.9%。 21. 美光:4月18日,美光将获得美国政府逾60亿美元补助。目前针对美光的补贴尚未最终确定。 22. 华为:4月19日,在第21届华为全球分析师大会期间,深圳市工信局与华为签署了战略合作协议,双方将发挥各自领域专长和优势,共同打造创新发展产业平台,构建产业国际交流合作中心,推进深圳"极速宽带先锋城市”建设,打造世界先进模式创新的下一代互联网Net5.5G城市标杆。 23. 大华:4月19日消息,浙江大华技术出售美国全资子公司全部股份,代表浙江大华撤资美国。报导透露释出股份的买家是中国台湾中影公司美国分公司,交易金额1,500万美元,且包括出售大华加拿大子公司价值100万美元库存产品。 24. 三星电子:4月19日消息,三星电子于美国硅谷扩大人工智能 (AI) 芯片设计的研发组织,致力研发采用RISC-V架构的AI芯片,透过差异化的技术挑战当前引领AI半导体市场的英伟达。 25. 英飞凌:4月19日,商务部部长王文涛会见英飞凌科技公司首席执行官哈内贝克,双方就英飞凌在华发展等议题进行交流。哈内贝克表示,中国是英飞凌全球最大销售市场,英飞凌看好中国经济发展前景,对“投资中国”充满信心,将持续扩大对华投资,加强本土生产和研发。 26. NVIDIA:4月20日股市收盘,NVIDIA跌幅扩大至10%,报762.1美元/股,为2月22日以来新低,市值跌超2000亿美元。 27. 东芝:4月18日消息,东芝公司正寻求裁员 5000 人,这一数字约占日本员工总数 10%。东芝正在缩减非核心业务,并将为此一次性支出约 1000 亿日元。 | 应用端动态 28. Meta:4月18日,Meta宣布公布了旗下最新大模型Llama 3。目前,Llama 3已经开放了80亿(8B)和700亿(70B)两个小参数版本,未来Meta将推出Llama 3的更大参数版本,其将拥有超过4000亿参数。 29. 华为:4 月18 日,华为Pura 70 系列手机发售。其中,华为 Pura 70 Ultra 首创超聚光伸缩摄像头,北斗卫星消息再升级,支持发送图片消息, 接入盘古大模型,带来AI 消除、AI云增强等更多智慧应用。 30. 联想:4 月18 日,联想发布Yoga Book AI 元启版等多款AI PC 新品,配备了个性化的AI agent 智能体“联想小天”。 31. 特斯拉:4月21日消息,特斯拉中国全系车型降价。Model Y售价降至24.99万元人民币,降幅5.3%;MODEL Y长续航版售价降至29.09万元人民币,降幅4.6%。 32. 格力:4月21日消息,格力电器取消了实施5年的全员销售制度,改为团队指标,减轻了个人销售压力。这一改变反映了格力对全员销售制度负面影响的认知,以及对市场运作规律的重新认识。
美光
芯查查资讯 . 2024-04-22 3 23 2465

米尔i.MX93核心板上市,MPU+MCU+NPU三芯一体,创新LGA设计
近日,米尔电子推出基于NXP i.MX 93系列产品-MYC-LMX9X核心板及开发板。NXP i.MX 9系列在i.MX 6和i.MX 8系列产品市场验证的基础上,继承了前代产品的优点的同时,进一步提升了性能、资源利用和价格的平衡。其中i.MX 93处理器配备双核Cortex-A55@1.7 GHz+Cortex-M33@250MHz,兼顾多任务和实时性需求,集成0.5 TOPS NPU赋能低成本轻量级AI应用。 NXP i.MX 93系列处理器还配备多种显示接口LVDS、MIPI-DSI、24位RGB,最高支持1080p60显示;多种视频输入接口MIPI-CSI、Parallel CSI;丰富外设接口资源,2个千兆以太网接口其中一个支持时间敏感型网络(TSN)、2个USB2.0接口、3个SD/SDIO/eMMC接口、2个CAN-FD接口、8个UART接口,8个I2C,8个SPI,2个I3C等,适用于充电桩、能源电力、医疗器械、工业HMI、运动控制器、工程机械等场景。 MYD-LMX9X开发板采用12V/2A直流供电,搭载了2路千兆以太网接口、1路USB2.0协议M.2 B型插座的5G/4G模块接口、板载1路USB WIFI模块、1路HDMI显示接口、1路LVDS显示接口、1路RGB显示接口、1路MIPI CSI摄像头接口、1路音频输入输出接口、2路USB HOST Type A、1路 USB OTG Type-C接口、1路Micro SD接口、1路CAN/RS485/RS232凤凰端子接口。
米尔电子
米尔电子 . 2024-04-19 3 19 1441

奖项申报|“IC Future 2024”年度芯势力产品奖/年度芯生力企业奖
IC Future 2024 年度芯势力产品 年度芯生力企业 奖项评选启动 / 2024年4月18日-5月22日 / “IC Future 2024”年度芯势力产品奖和年度芯生力企业奖,是由世界半导体大会暨南京国际半导体博览会自2022年起特别设立的行业荣誉,一年一评,旨在对半导体产业具有技术代表性、标志性、里程碑式的创新产品及技术,以及产品创新、技术创新和应用创新的先锋企业进行表彰,树立引领风向的行业标杆,发挥示范效应,从而为广大用户提供商贸对接、技术升级、产品选购的决策指导。 本届大会将通过“广泛征集、专家遴选、公开投票”的方式,规范、公正、透明地评选出“IC Future 2024”年度芯势力产品奖和年度芯生力企业奖。组委会将邀请获奖企业代表出席6月7日的颁奖仪式,现场颁发奖项,并在大会官方及数十家行业媒体、主流媒体平台集中宣传报道。 评选流程 报 名 4月18日-5月10日 下载申报表👇 【参选申报表】“IC Future 2024”年度芯势力产品奖、年度芯生力企业奖.docx 填写后提交至邮箱wsceexpo@163.com 初 筛 5月10日-5月14日 组委会组织专家评审对报名的参评产品/企业进行初筛,公布入围产品/企业。 投 票 5月14日-5月22日 对入围产品/企业进行公开投票,每日通过大会公众号分别公示两个奖项榜单。 公 布 5月22日 最终票数位列前10名的产品和前5名的企业,分别获评“IC Future 2024”年度芯势力产品奖和年度芯生力企业奖。大会官网、公众号、视频号、抖音等官方平台同步发布。 颁 奖 6月7日 “IC Future 2024”颁奖仪式现场颁奖,组委会向获奖企业代表颁发荣誉证书。大会官方及数十家行业媒体、主流媒体平台集中宣传报道。 获奖权益 权益一 “IC Future 2024”颁奖仪式现场颁奖, 颁发获奖证书 权益二 馆内广告牌,企业品牌露出(集中展示) 权益三 大会官方及数十家行业媒体、 主流媒体平台集中宣传报道 权益四 大会逛展直播专访 “IC Future” I See the Future 期待与业界同仁一起 见证“芯”力量,看见新未来 关于大会 世界半导体大会 暨南京国际半导体博览会 2024年6月5-7日 相约南京国际博览中心 展位火热预定中! 欢迎咨询组委会 宋女士 15205185603 史女士 15251839398 合作媒体
世半会暨南京国际半导体博览会 . 2024-04-19 2 1070

损失6.67亿元!台积电估计中国台湾花莲地震影响
4月19日,晶圆代工厂台积电公告说明 4 月 3 日花莲地震的影响,初步估计将于第 2 季认列扣除保险理赔后的相关地震损失约新台币 30 亿元(约人民币6.67亿元)。 台积电指出,中国台湾4月3日发生芮氏规模7.2地震,为过去25年来最强地震。新竹、龙潭和竹南等科学园区最大震度为5级,台中和台南科学园区最大震度为4级。 台积电表示,因在地震应变和灾害预防上拥有丰富经验与能力,并定期进行安全演习以确保万全准备,在地震发生后10小时内,晶圆厂设备的复原率超过70%,新建的晶圆厂如晶圆18厂的复原率超过80%。 在员工及供货商的共同努力,台积电指出,中国台湾厂区于地震发生后的第3日结束前完全复原。同时持续与客户保持密切联系并适时沟通相关影响。 台积电表示,晶圆厂没有停电,没有结构性损毁,所有的极紫外光(EUV)曝光机等重要设备也没有损坏。这次地震造成一定数量的生产中晶圆受到影响,预计大部分的生产损失将在第2季恢复,对第2季营收影响甚微。 台积电估计,地震将影响第2季毛利率约0.5的百分点,主要是晶圆报废和材料损耗相关损失,将于第2季认列扣除保险理赔后的相关地震损失约30亿元。全年业绩展望不变,美元营收将成长21%至26%。
台积电
芯查查资讯 . 2024-04-19 1 28 2261

基于立锜科技产品的240W PD3.1快充方案
2024年4月18日,致力于亚太地区市场的国际领先半导体元器件分销商---大联大控股宣布,其旗下诠鼎推出基于立锜科技(Richtek)RT7333、RT7795、RT7220E以及RT7209芯片的240W PD3.1快充方案。 图示1-大联大诠鼎基于立锜科技产品的240W PD3.1快充方案的展示板图 随着PD3.1快充协议的发布,USB充电技术迎来了重大突破。该协议将电源的输出电压提升至48V、充电功率同步提升至240W。在此背景下,传统的反激方案以及适用于20V输出的协议芯片已无法满足当前的市场需求。设备制造商需要更新他们的硬件设计,以支持更高电压和功率水平。为加快制造商设计,大联大诠鼎基于立锜科技RT7333、RT7795、RT7220E以及RT7209芯片推出240W PD3.1快充方案。 图示2-大联大诠鼎基于立锜科技产品的240W PD3.1快充方案的场景应用图 本方案搭载了前级PFC升压控制、AHB非对称半桥驱动控制以及SR控制策略,同时配备了支持48V输出的PD3.1协议芯片。这意味着方案可实现从100Vac-240Vac的全电压跨界输入适配。不仅如此,此方案还支持高达48V/5A 240W的标准功率输出,能够满足市场上绝大多数支持Type-C供电的笔记本、手机等设备的电力需求。此外,方案还可支持多种私有快充协议,并内置了各种保护机制,能够有效防止过压、过流、过热等潜在安全隐患,保障充电安全。 图示3-大联大诠鼎基于立锜科技产品的240W PD3.1快充方案的方块图 在技术层面,该方案采用了先进的AHB非对称半桥控制技术,通过降低功耗、提高效率、减少发热,实现了更快速的充电速度。同时,该方案具有极高的集成度,能够显着缩小充电器体积,为用户带来更加便捷、高效的充电体验。 核心技术优势: 方案采用PFC+AHB非对称半桥架构; 兼容3V~55V输出; 降低初次级应力; 效率比反激高,成本比LLC低; 支持各种主流快充协议,特别是PD3.1(48V输出)以及UFCS; 内含各种保护机制,尤其是LPS; 高集成,低成本。 方案规格: 90Vac~264Vac输入; 5V/3A、9V/3A、15V/3A、20V/5A、28V/5A、48V/5A输出; DoE VI,6级能效; EMI 6dB以上余量; 支持PD3.1、QC4.0、UFCS等多种快充协议; OCP、OVP、OTP、OPP、LPS各种保护。
立锜
立锜 . 2024-04-19 6 50 5076

瑞萨推出兼顾超低功耗和卓越25fs-rms抖动性能的全新FemtoClock™ 3时钟解决方案
2024 年 4 月 18 日,中国北京讯 - 全球半导体解决方案供应商瑞萨电子(TSE:6723)今日宣布推出适用于有线基础设施、数据中心和工业应用的全新超低25fs-rms时钟解决方案——FemtoClock™ 3,从而扩展其时钟解决方案产品阵容。新的产品家族包含8路和12路差分输出的超低抖动时钟发生器及抖动衰减器,可为下一代高速互连系统实现高性能、简单易用和高性价比的时钟树设计。新产品的目标应用包括电信交换机和路由器、机架式数据中心交换机、医疗影像、广播音视频等。 FemtoClock 3产品具有行业领先的超低的相位噪声和抖动,可满足112Gbps SerDes速率的需要,以及在48MHz至73MHz频率的无源晶振输入时,满足下一代224Gbps SerDes设计需求。本高集成度产品可具有多达四个时钟域,并提供具有出色信噪比(PSRR)的集成LDO(低压差稳压器),从而降低了电路板的复杂度与成本。 Zaher Baidas, Vice President of the Timing Division for Renesas表示:“瑞萨电子凭借数十年的经验和专利技术,致力于提供高品质的时钟解决方案,推动行业的进步。FemtoClock 3产品通过在单个器件中实现超低抖动的多时钟与同步功能,极大的优化印刷电路板设计、降低解决方案的面积及成本,从而支持行业的持续发展与创新。” Vincent Ho, CEO at UfiSpace表示:“FemtoClock 3是一款能为我们提供超低抖动性能,同时还能保持低功耗、优化印刷电路板设计并降低下一代交换机解决方案的PCB板面积的时钟解决方案。借助瑞萨打造的时钟解决方案,让我们有能力以高效率和低成本的方式推出先进产品。” FemtoClock 3产品家族的关键特性 业界领先的25fs-rms抖动性能超过下一代112Gbps和224Gbps SerDes参考时钟要求 支持多达4个时钟域,允许从单个器件生成所有系统时钟 产品型号多样,可提供抖动衰减、时钟同步和时钟产生功能,并具有8或12个差分输出端 功耗低至1.2W,使用1.8V单电源供电 集成非易失性存储器,可在工厂进行器件出厂定制且客户无需承担额外费用 小型7mm x 7mm 48引脚VFQFPN封装,和9mm x 9mm 64引脚VFQFPN封装 符合ITU-T G.8262和G.8262.1标准,用于增强型同步以太网 支持多种工作模式的单芯片方案,极大的简化了整体时钟树 FemtoClock 3支持多种工作模式,包括同步、抖动衰减和时钟发生。客户可将全新FemtoClock 3解决方案与瑞萨公司的ClockMatrix™、VersaClock、时钟驱动器和有源晶振等时钟解决方案组合在一起,以满足高性能有线基础设施和数据中心的高要求、高可靠性复杂时钟设计需求。 FemtoClock 3与瑞萨IC Toolbox(RICBox)应用程序无缝结合,使用户能够对评估板上的器件进行配置及编程。此外,RICBox还可与云平台上的瑞萨实验室(Renesas Lab)连接,为用户带来虚拟连接至真实实验室环境的能力。 成功产品组合 瑞萨将FemtoClock 3与其产品组合中的众多兼容器件相结合,创建了广泛的“成功产品组合”,包括1600G固定外形交换机。这些“成功产品组合”基于相互兼容且可无缝协作的产品,具备经技术验证的系统架构,带来优化的低风险设计,以加快产品上市速度。瑞萨现已基于其产品阵容中的各类产品,推出超过400款“成功产品组合”,使客户能够加速设计过程,更快地将产品推向市场。更多信息,请访问:renesas.com/win。 供货信息 FemtoClock 3产品和评估板现可从瑞萨及其分销合作伙伴处购买。了解样品订购和工厂定制等的更多信息,请访问:www.renesas.com/femtoclock3。 关于瑞萨时钟解决方案 瑞萨提供业界理想的广泛且深层次的芯片时钟产品组合,包括各种时钟缓冲器、有源晶振、时钟发生器、抖动衰减器和时钟同步器产品,可应对众多应用中的时钟挑战。瑞萨凭借在模拟和数字时钟产品领域超过20年的成熟专业知识,打造了具有极低相位噪声和超高性能,并采用先进时钟技术的产品组合。瑞萨带来业内唯一的“一站式”时钟解决方案,涵盖从全功能系统解决方案到简单时钟组件所需器件的专业知识及产品。有关瑞萨时钟解决方案的更多信息,请访问:www.renesas.com/clocks。 关于瑞萨电子 瑞萨电子(TSE: 6723),科技让生活更轻松,致力于打造更安全、更智能、可持续发展的未来。作为全球微控制器供应商,瑞萨电子融合了在嵌入式处理、模拟、电源及连接方面的专业知识,提供完整的半导体解决方案。成功产品组合加速汽车、工业、基础设施及物联网应用上市,赋能数十亿联网智能设备改善人们的工作和生活方式。更多信息,敬请访问renesas.com。关注瑞萨电子微信公众号,发现更多精彩内容。
瑞萨
瑞萨 . 2024-04-19 1 4 1161

浙江大华撤资美国,子公司股份由中影买下
4月19日,外媒报道,监视器大厂浙江大华技术出售美国全资子公司全部股份,代表浙江大华撤资美国,释出股份的买家,报导透露正是中国台湾中影公司美国分公司。 这是日前最新年报揭露的讯息,浙江大华已出售美国公司全部股份,买家是中国台湾电影制片公司中影公司旗下美国中央电影公司(Central Motion Picture USA),交易金额1,500万美元,且包括出售大华加拿大子公司价值100万美元库存产品。 协议1月3日签署,当月底即交易完成,年报显示全资子公司是大华在美仅存单位,显示美国子公司已从大华集团剥离。切割美国子公司原因,浙江大华并未说明,子公司是大华科技2014年为扩大国际影响力成立,大华科技也未回复日经询问。 2019年川普政府通过国防授权法(NDAA)后,2020年8月浙江大华、华为、中兴通讯、海能达通讯(hytera)与海康威视等公司,即被禁止与美国联邦机构签订合作合约。 浙江大华也早在2019年10月被美国商务部列入实体列表,与海康威视、海能达等28家中国公安部相关,以及科大讯飞、商汤科技、旷视科技、厦门美亚柏科信息一起列入实体列表。 到2021年美国联邦通讯委员会(FCC)也因《安全设备法案》禁止授权新设备贩卖。2022年美国国防部又将浙江大华列入「中国军工企业」名单。 这次浙江大华美国全资子公司买家,母公司为中国台湾影视生产商中影公司(CMPC),2005年民营化后,由鸿海集团创办人郭台铭胞弟郭台强买下并担任董事长。中影公司未响应收购原因。
大华
芯查查资讯 . 2024-04-19 1 13 3106
小米SU 7使用的NVIDIA Orin,有哪些替代产品选择?
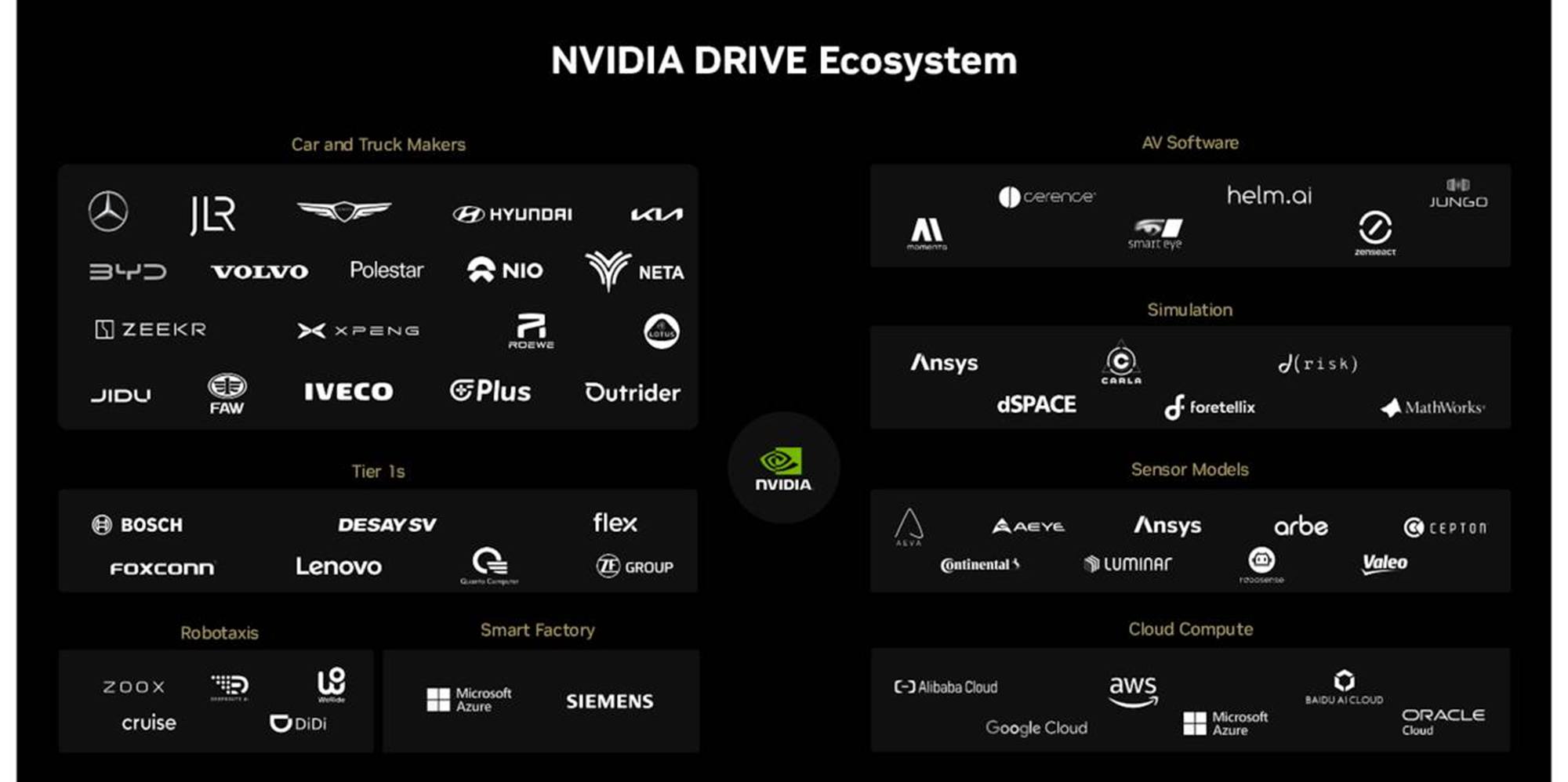
近期,网上传出小米SU 7的整车成本和主控板拆解,其自动驾驶和智能座舱主控分别使用DRIVE Orin X、高通骁龙8295芯片,可以说是高端芯片。 实际上,单就自动驾驶主控芯片来说,还有许多选择,对于L2+驾驶,目前大多数整车厂都采用多SoC解决方案,例如特斯拉的2颗FSD芯片,荣威RX5上的3颗地平线J3芯片,博越L和领克09使用地平线J3+TDA4,蔚来ET7和小鹏G9/P7i使用双NVIDIA Orin芯片。Mobileye的产品在入门级L2中比较常见,而且在短期内,TI TDA4L(5TOPS)等产品在L2领域对Mobileye构成了挑战。 图注:主要自动驾驶主控芯片(不完全统计) 整车厂和Tier 1的产品部署的一个方向是轻量级、高性价比的“舱行泊一体化”,这种复杂的嵌入式系统设计对算法模型、芯片算力调用(时分复用)、SoC的计算效率以及SoC和域控制材料的成本提出更高要求,因此在主控芯片的选择上需要量体裁衣。下面仅讲述自动驾驶主控芯片领域的主要芯片/平台,包括NVIDIA与竞争对手的产品应用和特点。 NVIDIA DRIVE:产品策略灵活,生态健全 NVIDIA DRIVE是专为自动驾驶行业打造的端到端平台,为软件定义的自动驾驶汽车提供全面的基础架构支持,整合人工智能基础架构、自动驾驶硬件和软件,涵盖L2级ADAS到L5级完全自动驾驶功能的开发需求。 NVIDIA DRIVE平台包含一系列计算芯片,其中,NVIDIA Orin单芯片提供的算力高,具有高度可靠性和冗余设计,成为目前市场上受瞩目的高性能自动驾驶芯片之一。Orin的升级版Thro已经发布,以最新的计算技术,加速智能汽车技术在行业内的部署,赋能汽车制造商的2025年车型。 图注:使用软件和自动驾驶技术驾驶汽车(图源:NVIDIA) NVIDIA在自动驾驶领域的优势是拥有强大的CUDA编程环境、TensorRT加速库以及Drive AGX软件栈,能够为开发者提供全面的解决方案,包括深度学习模型训练和部署,以及高度复杂的自动驾驶算法实现。 NVIDIA的用户群比较多,诸如梅赛德斯、捷豹、路虎高端品牌汽车的L4和L5自动驾驶常见其产品。此外,NVIDIA还采取与处理器厂商合作的战略,例如,与联发科的合作中,即使产品/服务以联发科品牌作为联发科品牌销售,但内部有NVIDIA的芯片。这种在自驾价值链上有广泛的布局,使其与OEM、其他合作伙伴有很大的灵活性。 图注:NVIDIA DRIVE生态包含汽车制造商、Tier 1、智能工厂、软件、仿真、传感器模块、云计算 由于用户、合作伙伴网络不断增长,需要通用可编程架构,但能够在相同的CUDA、API和张量架构(tensor architecture)上工作并跨代兼容,提高和增强旧软件的性能。 NVIDIA认为,全自动驾驶汽车至少还需要15年的时间,即便是现在,汽车智能化的重点是,汽车内部已经包含不同的计算机网络,这些计算机网络之间经常难以通信,NVIDIA产品可以将这一切结合在一起。 NVIDIA在中国市场有较强影响力,其战略是提供模块化解决方案,中小规模的客户可以选择他们负担得起的模块,并继续与其他供应商合作。 NVIDIA对NVIDIA DRIVE平台进行了大量投资,并希望利用他们在数据中心、Omniverse和高性能计算方面的优势,增加产品使用数量,这与高通等其他竞争对手不同,高通不太关注低于L2自动驾驶市场,而Mobileye的产品比较封闭。 高通Ride:主打高集成和低成本 高通最大优势是其在智能手机积累的经验,特别是从2G到5G中的基带技术是汽车从L1转向L5的关键组成部分,高通可以复用和管理不同的系统、软件堆栈和供应商。 传统燃油的智能化需要新的平台,为此,高通公司在SoC、无线连接和服务方面提供高度集成的产品,降低汽车制造商开发高级功能的难度。据悉,高通将在未来六个季度推出150个项目,每个项目都需要与汽车合作伙伴密切合作,从设计到产品落地需要18到30个月。 图注:高通骁龙Ride平台芯片(图源:高通) 高通在自动驾驶方面的产品是骁龙Ride芯片,其第二代Ride芯片SA8650是完全针对自动驾驶而设计。据悉,高通、中科创达和立讯精密合资成立的畅行智驾,预计2024年即可量产上车。此外,高通的中央计算平台芯片Ride Flex第一个产品是SA8775,国内多称其为舱驾一体,已有不少企业在开发中,预计2024年底量产上车。 就业务持续性来看,高通比较合理的商业模式是通过销售可扩展的硬件,实现50%-60%的功能,并能够在后期添加软件,满足不断提升的合规要求。此外,客户也可以在同一个平台上做出功能的增减。特别是在产品周期的后期阶段,软件和平台收入是一个长期战略,因为平台寿命要长得多,具有更多价值,而不是通过销售芯片产生价值。 追加销售(Upselling)或许是高通在自动驾驶领域营收的关键,10-20年以SaaS或PaaS业务方式持续追加销售额。随着时间的流逝,汽车制造商将拥有自己的收入来源,高通或将在“追加销售”中占有更大份额。 Mobileye EyeQ:侧重L2级自动驾驶并采用“黑盒模式” Mobileye大部分销售额来自EyeQ芯片。从ADAS到完全自动驾驶的渐进式转变过程中,Mobileye认为,完全自动驾驶至少还需要25年的时间,至少要到2050年才能大规模实现。因此,其业务重点还放在了Robotaxis(运用先进自动驾驶技术来提供运输服务的共享出行解决方案)上,目前Robotaxis部署规模甚至比最先进的自动驾驶汽车还要大。L3还没有到大规模合法上路的阶段,Mobileye侧重于L2的方案具有成本效益。Mobileye的成功在于其为厂商提供算法+芯片的软硬结合一站式自动驾驶解决方案的模式,但是这种模式也被业界称为“黑盒模式”,汽车制造商在使用的时候往往缺乏主导性。 图注:Mobileye的产品 华为Ascend:已经在许多车型上量产 华为在自动驾驶上的平台是MDC(Mobile Data Center),包含标准化的系列硬件产品、自动驾驶操作系统AOS、VOS及MDC Core、配套工具链及车路云协同服务,支持组件服务化、接口标准化、开发工具化,满足车规级安全要求。已在问界M5和M7、阿维达11、极狐阿尔法S Hi版落地量产。平台使用主控芯片为Ascend系列,针对自动驾驶场景的是Ascend AutoDrive芯片。以MDC 610为例,其主控芯片组合采用一颗Ascend 610+一颗英飞凌TC397。AI算力为200Tops(int8),ARM CORE的整型算力为220K DMIPs。 图注:自动驾驶SoC芯片性能对比(图源:华为) 地平线征程系列:具备多种不同合作模式的匹配能力 地平线面向智能驾驶的产品代号为“征程”,公开资料显示,2019、2020、2021年分别发布征程2、征程3、征程5芯片。征程5是地平线第三代车规级产品,基于地平线BPU®贝叶斯架构设计,可提供高达128TOPS算力。适用于最先进图像感知算法加速,还可支持激光雷达、毫米波雷达等多传感器融合。支持预测规划以及H.265/JPEG实时编解码,是面向高级别自动驾驶及智能座舱量产的理想选择。 图注:纳什架构是地平线继贝叶斯架构之后的迭代产物 资料显示,地平面目前合作的车企包括长安、广汽、上汽、长城、奇瑞、江淮、荣威、红旗、比亚迪、自游家、智己、理想、哪吒、岚图等。针对智驾行业的多元格局,地平线提供多样化合作模式,满足不同客户需求,核心产品为智驾芯片,同时围绕芯片提供软件方案的支持,因此具备多种不同合作模式的匹配能力,包括Tier1合作、ODM合作、传感器合作,软件商合作,以及Maas/Taas合作等。 小结 NVIDIA凭借其NVIDIA DRIVE系列芯片,尤其是Orin芯片,在自动驾驶芯片市场占据了显著地位。Orin因其强大的算力、卓越的能效比和完整的软件栈支持,被众多汽车制造商选为高级自动驾驶解决方案的核心组件。 高通骁龙Ride平台产品提供可扩展的高性能计算能力,强调高效节能,适用于不同级别的自动驾驶和智能座舱应用。 Mobileye在被英特尔收购之后继续推动EyeQ系列芯片的发展,EyeQ5等芯片专为自动驾驶场景设计,尤其擅长视觉处理和深度学习算法,而且Mobileye在低等级ADAS市场占有领先地位。 华为则依托自身强大的研发能力,推出了面向自动驾驶的芯片产品,结合华为云服务和全栈解决方案,力求在中国乃至全球市场占有一席之地。此外,地平线和黑芝麻智能作为中国自动驾驶芯片领域的领军企业,均在技术研发、市场拓展和资本运作等方面取得了实质性的成果,积极推动了国产自动驾驶芯片产业的发展与壮大。 各家芯片供应商都在追求更高的算力、更低的功耗以及更完善的软件生态系统,以适应自动驾驶技术不断升级的需求。多数公司都采取了提供全栈解决方案的方式,除了硬件芯片之外,还包含了相应的软件开发工具包、算法支持和服务体系。
小米
芯查查资讯 . 2024-04-18 10 16 2866
- 1
- 6
- 7
- 8
- 9
- 10
- 500